



























Tshiab neeg hlau muaj tib neeg kov
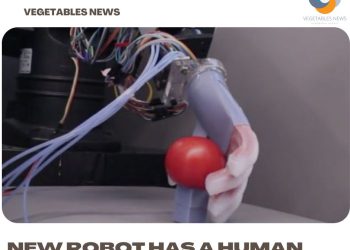
Most robots achieve grasping and tactile sensing through motorized means, which can be excessively bulky and rigid. A Cornell University group ...


Most robots achieve grasping and tactile sensing through motorized means, which can be excessively bulky and rigid. A Cornell University group ...