































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a Department of Management thiab Law, Kws qhia ntawv ntawm Economics, University of Rome Tor Vergata, Via Columbia, 2, Rome 00133, Italy
- b Department of Business Administration, Kws Qhia Ntawv ntawm Kev Tswj Xyuas, Kharazmi University, 1599964511 Tehran, Iran
- c Kws qhia ntawv ntawm Sciences ntawm Bizerte, University of Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d Tsev kawm ntawv ntawm International Management, Modul University Vienna, Am Kahlenberg 1, 1190 Vienna, Austria
| NYEEM INFO | SUB SIB THAM |
| keywords: Drones UAV Precision kev ua liaj ua teb Internet ntawm tej yam uas Bibliometrics | Drones, tseem hu ua Unmanned Aerial Vehicles (UAV), tau pom qhov kev txhim kho zoo kawg nkaus hauv kaum xyoo tsis ntev los no. Hauv kev ua liaj ua teb, lawv tau hloov kev ua liaj ua teb los ntawm kev muab cov neeg ua liaj ua teb kom txuag tau nyiaj ntau, nce ntxiv ua hauj lwm efficiency, thiab profitability zoo dua. Ntau xyoo dhau los, lub ntsiab lus ntawm kev ua liaj ua teb drones muaj nyiam kev kawm zoo kawg nkaus. Yog li ntawd, peb ua qhov kev tshuaj xyuas dav dav raws li bibliometrics txhawm rau sau thiab tsim cov ntaub ntawv kev kawm uas twb muaj lawm thiab nthuav tawm cov kev tshawb fawb tam sim no thiab cov hotspots. Peb siv cov txheej txheem bibliometric thiab txheeb xyuas cov ntaub ntawv nyob ib puag ncig cov drones ua liaj ua teb los sau cov ntsiab lus thiab soj ntsuam kev tshawb fawb yav dhau los. Peb qhov kev soj ntsuam qhia tau hais tias kev paub txog tej thaj chaw deb, kev ua liaj ua teb, kev kawm tob, kev kawm tshuab, thiab Is Taws Nem ntawm Yam yog cov ntsiab lus tseem ceeb ntsig txog kev ua liaj ua teb drones. Cov ntaub ntawv sib tham kev tsom xam nthuav tawm rau 6 pawg tshawb fawb dav hauv cov ntaub ntawv. Txoj kev tshawb no yog ib qho ntawm thawj qhov kev sim los sau cov kev tshawb fawb drone hauv kev ua liaj ua teb thiab qhia txog kev tshawb fawb yav tom ntej. |
Introduction
Kev ua liaj ua teb sawv cev rau thawj qhov khoom noj hauv ntiaj teb (Friha li al., 2021), thiab nws tau ntsib cov teeb meem loj heev vim yog
nce kev thov rau cov khoom noj khoom haus, zaub mov kev nyab xeeb, thiab kev txhawj xeeb txog kev nyab xeeb nrog rau kev hu rau kev tiv thaiv ib puag ncig, kev txuag dej, thiab
sustainability (Inoue, 2020). Qhov kev loj hlob no tau kwv yees mus txuas ntxiv txij li cov pej xeem hauv ntiaj teb tau kwv yees mus txog 9.7 billion los ntawm 2050
(2019). Txij li thaum kev ua liaj ua teb ua piv txwv tseem ceeb tshaj plaws ntawm kev siv dej thoob ntiaj teb, nws xav tias yuav tsum xav tau zaub mov thiab dej
kev siv yuav nce siab heev nyob rau yav tom ntej. Tsis tas li ntawd, kev nce ntxiv ntawm cov chiv thiab tshuaj tua kab
ua ke nrog kev siv zog ntawm kev ua liaj ua teb tuaj yeem ua rau muaj kev sib tw ib puag ncig yav tom ntej. Ib yam li ntawd, arable av yog txwv, thiab cov
tus naj npawb ntawm cov neeg ua liaj ua teb tau poob qis thoob ntiaj teb. Cov kev cov nyom no qhia txog qhov xav tau rau kev ua liaj ua teb tshiab thiab kev daws teeb meem (Eliyah
thiab al., 2018; Friha thiab al., 2021; Xyoo, 2020; Tzounis et al., 2017).
Kev koom tes nrog cov thev naus laus zis tshiab tau raug txheeb xyuas tias yog ib qho kev cog lus los daws cov teeb meem no. Kev ua liaj ua teb ntse (Brewster et al.,
2017; Tang li al., 2021) thiab kev ua liaj ua teb precision (Feng li al., 2019; Khanna & Kaur, 2019) tau tshwm sim los ntawm qhov kev sib cav zoo li no. Cov
yav dhau los yog ib qho kev xav dav dav rau kev siv cov ntaub ntawv sib txuas lus thev naus laus zis (ICT) thiab lwm yam kev hloov kho tshiab hauv kev ua liaj ua teb kom ua tau zoo thiab ua tau zoo (Haque et al., 2021). Cov tom kawg tsom mus rau qhov chaw tshwj xeeb kev tswj hwm uas thaj av tau muab faib ua
homogeneous qhov chaw, thiab txhua feem tau txais qhov tseeb ntawm cov tswv yim ua liaj ua teb rau kev cog qoob loo kom zoo dua los ntawm kev siv thev naus laus zis tshiab (Feng li al., 2019; Khanna & Kaur, 2019). Cov thev naus laus zis tseem ceeb uas tau nyiam cov kws tshawb fawb txog kev mloog hauv daim teb no suav nrog Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Internet of Things (IoT) (Gill et al., 2017; Li et al., 2021; Liu et al., 2019),
Artificial txawj ntse (AI) cov tswv yim, suav nrog kev kawm tshuab thiab kev kawm tob (Liakos li al., 2018; Parsaeian li al., 2020; Shadrin li al.,
2019), suav technologies (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo li al., 2019), cov ntaub ntawv loj (Gill li al., 2017; Tantalaki
et al., 2019), thiab blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
Ntxiv nrog rau cov thev naus laus zis tau hais los saum toj no, kev paub txog tej thaj chaw deb tau raug suav tias yog ib qho cuab yeej thev naus laus zis uas muaj peev xwm txhim kho.
ntse thiab precision ua liaj ua teb. Satellites, tib neeg-crewed aircraft, thiab drones yog nrov nyob deb-sensing technologies (Tsouros li al., 2019).
Drones, uas nrov npe hu ua Unmanned Aerial Vehicles (UAVs), Unmanned Aircraft Systems (UAS), thiab cov dav hlau tsav dav hlau, yog ntawm
tseem ceeb heev vim lawv muaj ntau yam zoo nyob rau hauv kev sib piv nrog rau lwm yam tej thaj chaw deb-sensing technologies. Piv txwv li, drones tuaj yeem xa
cov duab zoo thiab kev daws teeb meem siab nyob rau hnub huab cua (Manfreda li al., 2018). Tsis tas li ntawd, lawv muaj thiab hloov ceev yog lwm yam
cov txiaj ntsig (Radoglou-Grammatikis li al., 2020). Piv nrog rau cov dav hlau, drones yog tus nqi qis thiab yooj yim rau kev teeb tsa thiab tswj hwm (Tsouros li al., 2019). Txawm hais tias nws yog thawj zaug siv rau kev ua tub rog, drones tuaj yeem tau txais txiaj ntsig ntau rau pej xeem siv, piv txwv li hauv kev tswj cov saw hlau (A. Rejeb, Rejeb, li al., 2021a), rau tib neeg lub hom phiaj (A. Rejeb, Rejeb, thiab al., 2021c), ntse kev ua liaj ua teb, kev soj ntsuam thiab daim ntawv qhia, cov ntaub ntawv kab lis kev cai, kev tswj hwm kev puas tsuaj, thiab kev txuag hav zoov thiab tsiaj qus (Panday, Pratihast, et al., 2020). Hauv kev ua liaj ua teb, manifold daim ntawv thov thaj chaw ntawm drones muaj nyob rau hauv vim lawv tuaj yeem ua ke nrog cov thev naus laus zis tshiab, kev muaj peev xwm hauv computer, thiab cov sensors onboard los txhawb kev tswj cov qoob loo (xws li, daim ntawv qhia, kev soj ntsuam, dej, kev kuaj mob cog) (H. Huang li al., 2021) , txo kev puas tsuaj, kev ceeb toom ntxov, kev txuag tsiaj qus thiab hav zoov rau npe ob peb (Negash li al., 2019). Ib yam li ntawd, cov drones tuaj yeem siv tau rau hauv ntau yam kev ua liaj ua teb, suav nrog kev saib xyuas qoob loo thiab kev loj hlob, kev kwv yees cov txiaj ntsig, kev ntsuas kev ntxhov siab hauv dej, thiab cov nroj tsuag, kab tsuag, thiab kev kuaj kab mob (Inoue, 2020; Panday, Pratihast, et al., 2020). Tsis tsuas yog siv drones tuaj yeem siv rau kev saib xyuas, kwv yees, thiab tshawb pom lub hom phiaj raws li lawv cov ntaub ntawv xav tau, tab sis kuj tseem siv tau rau kev siv dej kom raug thiab cov nyom nyom, kab tsuag, thiab kev tswj kab mob. Hauv lwm lo lus, drones muaj peev xwm txau dej thiab tshuaj tua kab hauv tus nqi raws li cov ntaub ntawv ib puag ncig. Cov txiaj ntsig ntawm drones hauv kev ua liaj ua teb tau sau tseg hauv Table 1.
Cov txiaj ntsig tseem ceeb ntawm drones hauv kev ua liaj ua teb.
| Nyiaj pab | Kev siv (s) |
| Txhim kho lub cev thiab spatial kev txiav txim siab | (Gago li al., 2015; Niu et al., 2020; Srivastava thiab al., 2020) |
| Yooj yim rau kev ua liaj ua teb precision | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaijiang et al., 2017) |
| Classification thiab scouting ntawm cov qoob loo | (Inoue, 2020; Kalischuk et al., 2019; Lopez-' Granados thiab al., 2016; Maimaijiang et al., 2017; Melville thiab al., 2019; Moharana & Dutta, 2016) |
| Kev siv cov chiv | (L. Deng et al., 2018; Guan et al., 2019) |
| Kev saib xyuas ntawm drought | (Fawcett li al., 2020; Panday, Pratihast, thiab al., 2020; Su et al., 2018) |
| Kev kwv yees biomass | (Bendig li al., 2014) |
| Yield kwv yees | (Inoue, 2020; Panday, Shrestha, thiab al., 2020; Tao thiab al., 2020) |
| Txo kev puas tsuaj | (Negash et al., 2019) |
| Kev txuag tsiaj qus thiab hav zoov | (Negash et al., 2019; Panday, Pratihast, thiab al., 2020) |
| Kev ntsuas kev ntxhov siab hauv dej | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang thiab al., 2019) |
| Kab tsuag, nroj, thiab kab mob nrhiav tau | (Gaˇsparovi'c et al., 2020; Inoue, 2020; J. Su, Liu, thiab al., 2018; X. Zhang et al., 2019) |
Ntawm qhov tod tes, drones ntsib kev txwv ib yam. Pilot kev koom tes, lub cav fais fab, stability thiab kev cia siab, sensors 'zoo vim payload
Cov kev txwv hnyav, cov nqi siv, thiab kev tswj hwm kev dav hlau, yog nyob ntawm lawv (C. Zhang & Kovacs, 2012). Peb piv cov tsis muaj
ntawm peb lub xov tooj ntawm tes tej thaj chaw deb sensing technologies nyob rau hauv Table 2. Lwm yam tej thaj chaw deb sensing technologies, xws li av sensors, yog tshaj qhov tseem ceeb ntawm txoj kev tshawb no.
Shortcomings ntawm ntau yam mobile tej thaj chaw deb sensing technologies.
| Tej thaj chaw deb tsoov yees | Ua tsis tau zoo | References |
| Drone (UAV) | Kev koom tes nrog tsav; duab' zoo (nruab nrab); tus nqi siv (nruab nrab); stability, maneuverability, thiab kev ntseeg tau; standardization; lub cav fais fab; txwv lub zog qhov chaw (lub roj teeb ntev); txwv ya davhlau ntev, kev sib tsoo thiab cyberattacks; txwv load hnyav; cov ntaub ntawv loj thiab kev ua cov ntaub ntawv tsawg peev xwm; tsis muaj kev tswj hwm; tsis muaj kev txawj ntse, nkag siab thaiv kev nkag mus rau ua liaj ua teb drones; | (Bacco et al., 2018; Dawaliby thiab al., 2020; Hardin & Hardin, 2010; Hardin & Jensen, 2011; Lagkas et al., 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda thiab al., 2018, 2018; Nebiker et al., 2008; Puri thiab al., 2017; Velusamy et al., 2022; C. Zhang & Kev, 2012) |
| Satellite | Periodic satellite kev pab them nqi, txwv spectral daws teeb meem; vulnerability rau visibility teeb meem (eg, huab); Tsis muaj thiab qis hloov ceev; orientation thiab vignetting cuam tshuam cov ntaub ntawv spatial kim sau; xa cov ntaub ntawv qeeb sijhawm rau cov neeg siv kawg | (Aboutalebi et al., 2019; Cen thiab al., 2019; Chen thiab al., 2019; Nansen & Elliott, 2016; Panday, Pratihast, thiab al., 2020; Sai Vineeth thiab al., 2019) |
| aircraft | Tus nqi saws loj; kev teeb tsa nyuaj; cov nqi kho mob; unavailability ntawm txhim khu kev qha dav hlau, geometry ntawm lub cov duab; cov ntaub ntawv tsis tu ncua nrhiav tau; tsis yooj yim; raug xwm txheej tuag; cov ntaub ntawv sensor variations vim vibrations; teeb meem georeferencing | (Armstrong thiab al., 2011; Atkinson thiab al., 2018; Barbedo & Koenigkan, 2018; Kovalev & Voroshilova, 2020; Suomalain et al., 2013; Tham et al., 2013) |
Raws li kev siv tshuab ntau yam thiab ntau hom kev ua liaj ua teb, drones tau tshawb xyuas los ntawm ntau qhov kev xav. Piv txwv li, cov kws tshawb fawb tau tshuaj xyuas cov ntawv thov drone hauv kev ua liaj ua teb (Kulbacki li al., 2018; Mogili & Deepak, 2018), lawv txoj kev koom tes rau kev ua liaj ua teb precision (Puri li al., 2017; Tsouros li al., 2019), lawv complementarity nrog rau lwm yam. Cov thev naus laus zis niaj hnub (Al-Thani li al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha li al., 2018), thiab muaj peev xwm ua kom lawv cov peev txheej navigational thiab hnov qab (Bareth et al. , 2015; Suomalainen et al., 2014). Txij li thaum kev tshawb fawb ntawm kev siv drone hauv kev ua liaj ua teb tau dhau los ua ntau yam (Khan li al., 2021)), nws yuav tsum tau sau cov ntaub ntawv tseem ceeb thiab nthuav tawm cov qauv kev txawj ntse. Tsis tas li ntawd, raws li lub teb chaws high-tech nrog kev txhim kho txuas ntxiv, kev tshuaj xyuas cov txheej txheem yuav tsum tau ua kom lub sijhawm luv luv ntawm cov ntaub ntawv uas twb muaj lawm thiab txheeb xyuas qhov kev tshawb fawb tseem ceeb. Rau
hnub tim, muaj qee qhov kev tshuaj xyuas uas tham txog kev siv drone hauv kev ua liaj ua teb. Piv txwv li, Mogili thiab Deepak (2018) luv luv tshuaj xyuas qhov cuam tshuam rau kev saib xyuas qoob loo thiab tshuaj tua kab. Inoue (2020) ua kev tshuaj xyuas ntawm satellite thiab drone siv nyob rau hauv tej thaj chaw deb sensing hauv kev ua liaj ua teb. Tus sau tshawb fawb txog cov teeb meem thev naus laus zis ntawm kev siv kev ua liaj ua teb ntse thiab kev koom tes ntawm satellites thiab drones raws li cov ntaub ntawv tshawb fawb thiab kev coj ua zoo tshaj plaws. Tsouros et al. (2019) qhia txog ntau hom drones thiab lawv cov kev siv tseem ceeb hauv kev ua liaj ua teb, qhia txog ntau yam kev tau txais cov ntaub ntawv thiab cov txheej txheem ua haujlwm. Tsis ntev los no, Aslan et al. (2022) tau ua ib qho kev tshuaj xyuas tag nrho ntawm UAV daim ntawv thov hauv kev ua liaj ua teb thiab qhia txog qhov muaj feem cuam tshuam ntawm kev sib koom ua ke hauv zos thiab daim ntawv qhia rau UAV hauv tsev cog khoom. Diaz-Gonzalez et al. (2022) tau tshuaj xyuas cov kev tshawb fawb tsis ntev los no ntawm cov qoob loo cog qoob loo raws li cov txheej txheem kev kawm sib txawv thiab cov chaw taws teeb
kev soj ntsuam systems. Lawv qhov kev tshawb pom tau qhia tias UAVs muaj txiaj ntsig zoo los kwv yees cov ntsuas av thiab ua haujlwm zoo dua satellite systems nyob rau hauv cov nqe lus ntawm kev daws teeb meem spatial, cov ntaub ntawv temporality, thiab yoog raws. Basiri et al. (2022) tau ua ib qho kev tshuaj xyuas tag nrho ntawm ntau txoj hauv kev thiab txoj hauv kev los daws cov teeb meem kev npaj rau ntau lub rotor UAVs hauv cov ntsiab lus ntawm kev ua liaj ua teb precision. Ntxiv mus, Awais et al. (2022) tau sau tseg daim ntawv thov ntawm UAV tej thaj chaw deb sensing cov ntaub ntawv nyob rau hauv cov qoob loo los kwv yees cov dej raws li txoj cai thiab muab ib tug in-debth synthesis ntawm lub prospective muaj peev xwm ntawm UAV tej thaj chaw deb sensing rau pov tseg kev nyuaj siab daim ntawv thov. Thaum kawg, Aquilani et al. (2022) tau tshuaj xyuas cov txheej txheem ua liaj ua teb ua ntej siv hauv cov tsiaj txhu hauv pasturebased thiab txiav txim siab tias qhov chaw taws teeb pom kev los ntawm UAVs yog qhov zoo rau kev ntsuam xyuas biomass thiab kev tswj xyuas tsiaj txhu.
Tsis tas li ntawd, kev sim siv UAVs hauv kev saib xyuas, taug qab, thiab khaws cov tsiaj txhu tau tshaj tawm tsis ntev los no.
Txawm hais tias cov kev tshuaj xyuas no ua rau muaj kev nkag siab tshiab thiab tseem ceeb, tsis muaj kev tshuaj xyuas dav dav thiab hloov tshiab raws li cov ntaub ntawv teev tseg hauv cov ntaub ntawv, uas nthuav tawm qhov sib txawv ntawm kev paub meej. Tsis tas li ntawd, nws tau hais tias thaum cov kws tshaj lij kev tsim khoom loj hlob hauv kev tshawb fawb, nws tseem ceeb heev rau cov kws tshawb fawb los siv cov kev tshuaj xyuas ntau kom nkag siab txog cov qauv kev paub ntawm lub npe (Rivera & Pizam, 2015). Ib yam li ntawd, Ferreira et al. (2014) sib cav hais tias raws li kev tshawb fawb teb paub tab thiab ua intricate, cov kws tshawb fawb yuav tsum tsom mus rau qee lub sij hawm ua kom nkag siab txog cov kev paub uas tau tsim thiab nthuav tawm los nthuav qhia cov kev koom tes tshiab, ntes cov kev tshawb fawb thiab cov qauv, txheeb xyuas cov ncauj lus twg tau kawm, thiab delve rau hauv cov qauv kev paub ntawm thaj chaw thiab cov lus qhia muaj peev xwm tshawb fawb. Thaum Raparelli thiab Bajocco (2019) tau ua ib qho kev ntsuam xyuas bibliometric los tshuaj xyuas qhov kev paub ntawm cov ntawv thov drone hauv kev ua liaj ua teb thiab hav zoov, lawv txoj kev tshawb fawb tsuas yog txiav txim siab cov kev tshawb fawb tshawb fawb luam tawm thaum xyoo 1995 thiab 2017, uas tsis muaj kev cuam tshuam txog qhov muaj zog ntawm qhov chaw nrawm nrawm no. Tsis tas li ntawd, cov kws sau ntawv tsis tau sim txheeb xyuas qhov muaj txiaj ntsig zoo tshaj plaws hauv kev ua haujlwm, suav nrog cov ntaub ntawv, thiab ntsuas cov qauv kev txawj ntse uas siv kev txheeb xyuas kev sib koom ua ke. Yog li ntawd, nws yog ib qho tsim nyog los sau cov ntaub ntawv los qhia cov kev tshawb fawb tam sim no, cov ncauj lus, thiab cov hotspots.
Txhawm rau ua kom paub qhov sib txawv no, peb siv cov txheej txheem ntau thiab cov txheej txheem bibliometric nruj los tshuaj xyuas lub xeev tam sim no ntawm kev tshawb fawb ntawm kev sib tshuam ntawm drones thiab kev ua liaj ua teb. Peb sib cav hais tias txoj kev tshawb fawb tam sim no ua rau ntau qhov kev pab cuam rau cov ntaub ntawv uas twb muaj lawm los ntawm kev tshuaj xyuas cov cuab yeej tshiab uas xav tau hauv kev ua liaj ua teb vim nws muaj peev xwm hloov tau ntau yam hauv cov haujlwm no. Qhov xav tau rau kev soj ntsuam bibliometric ntawm kev ua liaj ua teb drones tau hnov ntau dua muab cov kev paub tawg thiab tawg ntawm cov drones hauv cov ntsiab lus ua liaj ua teb. Ib yam li ntawd, cov ntaub ntawv hais txog kev ua liaj ua teb drones yuav tsum tau muab faib ua pawg, xav txog cov kev tshawb fawb muaj txiaj ntsig tshaj plaws uas tsim lub hauv paus ntawm qhov kev tshawb fawb no. Cov txiaj ntsig hauv kev tshuaj ntsuam kuj suav nrog kev qhia meej ntawm cov ntsiab lus tshawb fawb tseem ceeb uas sawv cev hauv cov ntaub ntawv. Xav txog qhov kev hloov pauv ntawm lub peev xwm ntawm thev naus laus zis, peb pom zoo tias qhov kev sib txuas lus tob tob ua rau muaj kev nkag siab tshiab los ntawm kev txiav txim siab ua haujlwm muaj txiaj ntsig thiab nthuav tawm cov ntsiab lus hais txog drones lub peev xwm rau kev ua liaj ua teb.
Yog li peb siv zog ua kom tiav cov hom phiaj tshawb fawb hauv qab no:
- Kev txheeb xyuas cov ntawv tshaj tawm muaj txiaj ntsig nrog cov txiaj ntsig zoo rau kev siv drone hauv kev ua liaj ua teb.
- Clustering ntawm cov ntaub ntawv, txheeb xyuas cov kev tshawb fawb foci, thiab daim ntawv qhia ntawm lub ntsiab 'kev txawj ntse qauv' kev tshawb fawb raws li semantic zoo sib xws los ntawm kev siv co-citation tsom xam.
- Kev nkag siab txog kev hloov pauv ntawm kev sib txuas thiab kev sib txuas lus hauv lub sijhawm ntawm ntau yam kev tshaj tawm hauv thaj chaw thiab kev txheeb xyuas cov lus qhia kev tshawb fawb yav tom ntej thiab cov ntsiab lus kub.
Cov seem ntawm daim ntawv yog tsim raws li hauv qab no: Tshooj 2 qhia txog cov txheej txheem thiab cov txheej txheem sau cov ntaub ntawv; ntu 3 muab cov txiaj ntsig ntawm kev txheeb xyuas; thiab ntu 4 tham txog qhov kev tshawb pom thiab xaus nrog kev tshawb fawb, kev cuam tshuam, thiab cov lus qhia yav tom ntej.
Vib this
Hauv qhov kev tshawb fawb tshawb fawb tam sim no, peb ua ib qho kev ntsuam xyuas bibliometric los tshawb nrhiav cov ntawv thov drone hauv kev ua liaj ua teb. Qhov kev ua kom muaj nuj nqis no nthuav tawm cov qauv kev txawj ntse ntawm kev txawj ntse (Arora & Chakraborty, 2021) thiab cov xwm txheej tam sim no, cov ntsiab lus kub, thiab cov lus qhia kev tshawb fawb yav tom ntej uas tuaj yeem tshawb xyuas los ntawm kev siv cov qauv no (Kapoor li al., 2018; Mishra li al. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020). Feem ntau, kev tshuaj xyuas bibliometric tshuaj xyuas cov ntaub ntawv tseem ceeb los piav qhia thiab nthuav tawm cov qauv zais ntawm kev sib txuas lus thiab kev hloov pauv ntawm kev qhuab qhia raws li kev txheeb cais thiab kev ua lej, thiab nws siv rau cov ntaub ntawv loj (Pritchard, 1969; Me, 1999; Tahai & Rigsby. Ib., 1998). Los ntawm kev siv bibliometrics, peb xav kom nkag siab zoo dua txog cov ntsiab lus uas twb muaj lawm thiab kev tshawb fawb foci uas pab txhawb rau lub npe raws li qhov zoo sib xws (Thelwall, 2008). Bibliometrics muab kev nkag siab tshiab txhawb nqa los ntawm lub hom phiaj kom muaj zog ntawm cov txheej txheem (Casillas & Acedo, 2007). Ntau tus kws tshawb fawb yav dhau los tau ua cov kev tshawb fawb bibliometric hauv cov cheeb tsam cuam tshuam, suav nrog kev ua liaj ua teb, kev paub txog thaj chaw deb, thiab kev hloov pauv digital (Armenta-Medina li al., 2020; Bouzembrak li al., 2019; A. Rejeb, Treiblmaier, et al., 2021; W. & Queiroz, 2021; Wang et al., 2019).
Kev tshuaj ntsuam xyuas
Kev txheeb xyuas cov ntaub ntawv qhia tawm ntau yam kev nkag siab rau hauv ib qho kev tshawb fawb. Ua ntej tshaj plaws, nws pab nthuav tawm cov kws sau ntawv muaj txiaj ntsig tshaj plaws thiab cov ntawv tshaj tawm uas ua rau muaj kev tshawb fawb thiab ua rau muaj kev cuam tshuam loj (Gundolf & Filser, 2013). Qhov thib ob, kev paub ntws thiab kev sib txuas lus ntawm cov kws sau ntawv tuaj yeem raug nthuav tawm. Thaum kawg, los ntawm kev taug qab cov kev sib txuas ntawm kev hais tawm thiab hais txog kev ua haujlwm, ib tus tuaj yeem tshawb nrhiav cov kev hloov pauv thiab kev hloov pauv ntawm kev paub txog lub sijhawm (Pournader
et al., 2020). Cov ntaub ntawv xov xwm siab ntawm cov ntawv tshaj tawm qhia txog nws qhov tseem ceeb thiab kev koom tes ntau rau kev tshawb fawb (Baldi, 1998; Gunolf & Filser, 2013; Marinko, 1998). Kev txheeb xyuas cov ntawv tshaj tawm kuj tseem pab txheeb xyuas cov haujlwm tseem ceeb thiab taug qab lawv cov koob npe thiab kev vam meej nyob rau lub sijhawm.
Kev txheeb xyuas cov ntaub ntawv sib koom ua ke
Co-citation tsom xam yog ib txoj hauv kev tseem ceeb los tshawb txog kev sib raug zoo ntawm kev tshaj tawm thiab piav qhia txog cov qauv kev txawj ntse ntawm ib thaj chaw (Nerur li al., 2008). Hauv lwm lo lus, los ntawm kev txheeb xyuas cov ntawv tshaj tawm tshaj tawm thiab lawv cov kev sib txuas, cov txheej txheem muab cov ntawv tshaj tawm rau hauv pawg tshawb fawb sib txawv nyob rau hauv cov ntawv tshaj tawm hauv pawg tsis tu ncua qhia cov tswv yim zoo sib xws (McCain, 1990; Small, 1973). Nws yog ib qho tseem ceeb uas yuav tsum tau hais tias qhov zoo sib xws tsis txhais tau tias qhov kev tshawb pom ntawm cov ntawv tshaj tawm yog
cohesive thiab pom zoo nrog ib leeg; Cov ntawv tshaj tawm muaj nyob rau tib pawg vim muaj cov ncauj lus zoo sib xws, tab sis lawv tuaj yeem muaj qhov tsis sib haum xeeb.
Cov ntaub ntawv sau thiab tshawb xyuas
Ua raws li cov txheej txheem uas tau hais los ntawm White and Griffith (1981), peb tau ua tiav kev tshawb fawb ntawm cov ntawv sau xov xwm kom npog tag nrho cov kev tshawb fawb ntawm kev siv drone hauv kev ua liaj ua teb, ua raws tsib kauj ruam hauv qab no:
- Thawj kauj ruam yog sau cov ntaub ntawv. Scopus tau raug xaiv los ua ib qho ntawm cov ntaub ntawv muaj txiaj ntsig zoo tshaj plaws thiab muaj kev ntseeg siab nrog cov txiaj ntsig tau zoo. Cov ntaub ntawv meta-cov ntaub ntawv ntawm cov ntawv tshaj tawm ntsig txog txhua daim ntawv thov drone hauv kev ua liaj ua teb tau muab rov qab. Tom qab ntawd peb txheeb xyuas cov ntawv xaiv, tshem tawm cov ncauj lus tawm ntawm qhov kev tshuaj ntsuam.
- Peb txheeb xyuas cov ntaub ntawv thiab txheeb xyuas cov ntsiab lus tseem ceeb tshaj plaws uas siv hauv thaj chaw tshawb fawb.
- Siv kev txheeb xyuas cov ntaub ntawv pov thawj, peb tshawb nrhiav kev sib txuas ntawm cov kws sau ntawv thiab cov ntaub ntawv los nthuav qhia cov qauv kev sau ntawv hauv qab. Peb kuj tau txheeb xyuas cov kws sau ntawv thiab cov ntawv tshaj tawm uas muaj feem cuam tshuam nrog kev koom tes tseem ceeb rau kev ua liaj ua teb drones.
- Peb tau ua qhov kev soj ntsuam sib koom ua ke los pab pawg cov ntawv tshaj tawm zoo sib xws rau hauv pawg.
- Thaum kawg, peb tau txheeb xyuas cov kev sib txuas thiab kev sib txuas ntawm cov teb chaws, cov koom haum, thiab cov ntawv xov xwm los piav qhia txog kev sib koom tes.
Kev txheeb xyuas cov ntsiab lus tshawb nrhiav tsim nyog
Peb siv cov hlua tshawb nrhiav hauv qab no rau kev sib sau cov ntaub ntawv: (drone * OR "unmanned aerial tsheb" OR uav * OR "unmanned aircraf system"OR uas LOSSIS “cov dav hlau tsav dav hlau”) THIAB (ua liaj ua teb lossis ua liaj ua teb lossis ua liaj ua teb lossis ua liaj ua teb). Kev tshawb nrhiav tau ua nyob rau lub Cuaj Hli 2021. Drones muaj ntau lub npe, suav nrog UAV, UAS, thiab cov dav hlau tsav dav hlau (Sah et al., 2021). Cov ntsiab lus tshawb fawb tshwj xeeb ntsig txog kev ua liaj ua teb raug txheeb xyuas raws li kev tshawb fawb ntawm Abdollahi li al. (2021). Txhawm rau kom pom tseeb thiab pom tseeb, cov lus nug tseeb uas peb tau siv yog muab rau hauv Daim Ntawv Ntxiv 1. Tom qab cov txheej txheem tu cov ntaub ntawv, peb tsim cov ntawv nyeem uas tau thauj khoom tom qab rau hauv BibExcel, ib qho cuab yeej siv rau kev txheeb xyuas kev txheeb xyuas thiab sib koom ua ke. Cov cuab yeej no tseem muaj kev sib cuam tshuam yooj yim nrog lwm cov software thiab muaj qhov tseem ceeb ntawm kev ywj pheej hauv cov ntaub ntawv tuav thiab tshuaj xyuas. VOSviewer version 1.6.16 tau siv los ua kom pom qhov kev tshawb pom thiab tsim cov kev sib txuas hauv bibliometric (Eck & Waltman, 2009). VOSviewer muaj ntau yam kev pom kev pom, tshwj xeeb tshaj yog rau kev txheeb xyuas cov ntawv qhia txog bibliometric (Geng li al., 2020). Tsis tas li ntawd, nws pab muab cov txiaj ntsig pom tseeb uas pab kom nkag siab zoo dua cov txiaj ntsig (Abdollahi li al., 2021). Siv cov hlua tshawb nrhiav raws li tau hais los saum toj no, peb tau sau thiab khaws tag nrho cov ntawv tshaj tawm. Thawj qhov kev tshawb fawb tau ua tiav tag nrho ntawm 5,085 cov ntaub ntawv. Txhawm rau kom ntseeg tau qhov zoo ntawm cov qauv uas tau xaiv, tsuas yog cov ntawv xov xwm tshuaj xyuas cov neeg sib tham tau raug txiav txim siab hauv kev tshawb fawb, ua rau tsis suav nrog lwm hom ntaub ntawv, xws li cov phau ntawv, tshooj, rooj sib tham, thiab cov ntawv sau. Thaum lub sijhawm kev tshuaj ntsuam xyuas, tsis muaj feem cuam tshuam (piv txwv li, dhau qhov kev ua haujlwm ntawm qhov haujlwm no), qhov tsis txaus ntseeg (piv txwv li, cov ntaub ntawv duplicates los ntawm kev ntsuas ob npaug), thiab cov ntawv tsis hais lus Askiv tau raug lim tawm. Cov txheej txheem no ua rau muaj kev suav nrog 4,700 cov ntaub ntawv hauv kev tshuaj ntsuam zaum kawg.
Kev tshawb nrhiav thiab kev sib tham
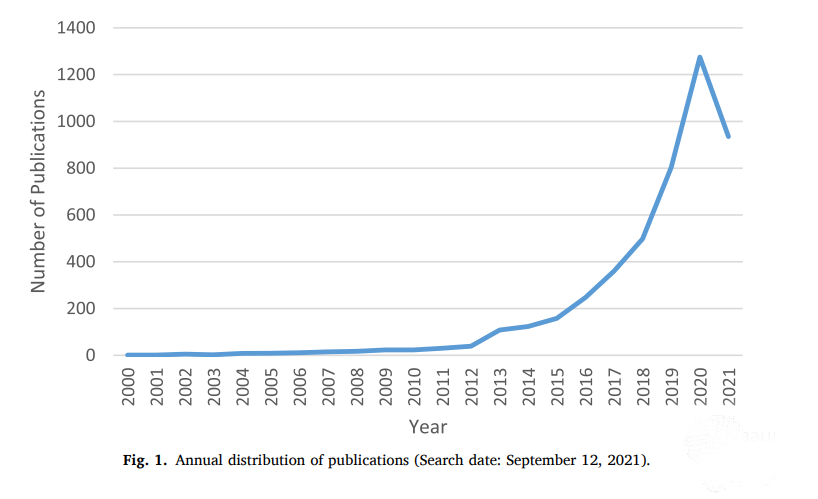
Txhawm rau pib, peb tau txheeb xyuas cov kev tsim tawm hauv kev tshaj tawm cov ntaub ntawv tam sim no ntawm cov drones ua liaj ua teb. Kev faib tawm ib ntus ntawm kev tshawb fawb txog kev tshawb fawb tau pom nyob rau hauv daim duab 1. Peb pom muaj kev tshaj tawm sai sai txij li xyoo 2011 (30 tshaj tawm) mus ntxiv; yog li ntawd, peb txiav txim siab faib lub sij hawm tsom xam ua ob theem sib txawv. Peb xa mus rau lub sijhawm nruab nrab ntawm 1990 thiab 2010 raws li theem tsim, uas muaj kwv yees li xya daim ntawv luam tawm txhua xyoo. Lub sijhawm tom qab xyoo 2010 tau raug hu ua theem kev loj hlob txij li kev tshawb fawb ntawm kev siv drone hauv kev ua liaj ua teb tau pom qhov kev nthuav dav ntxiv rau lub sijhawm no. Tom qab xyoo 2010, cov ntawv tshaj tawm tau nce ntxiv tau lees paub qhov kev txaus siab ntawm cov kws tshawb fawb, uas tseem qhia tau tias cov drones tau siv rau kev paub txog tej thaj chaw deb thiab siv hauv kev ua liaj ua teb precision (Deng li al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020. ). Tshwj xeeb, cov ntawv tshaj tawm tau nce los ntawm 108 hauv 2013 mus rau 498 hauv 2018 thiab nce siab ntawm 1,275 hauv 2020. Tag nrho ntawm 935 tsab xov xwm tau tshaj tawm thaum Lub Ib Hlis thiab nruab nrab Lub Cuaj Hli 2021. Tom qab ntawd, peb tau xaiv los tsom peb qhov kev soj ntsuam ntxiv rau theem kev loj hlob. txij li lub sijhawm no qhia txog qhov tsis ntev los no thiab tseem ceeb tshaj plaws ntawm kev ua liaj ua teb drones.
Cov ntsiab lus tsom xam
Cov lus tseem ceeb uas cov kws sau ntawv xaiv rau ib qho kev tshaj tawm muaj qhov cuam tshuam tseem ceeb ntawm cov ntawv sawv cev li cas thiab kev sib txuas lus li cas hauv zej zog kev tshawb fawb. Lawv txheeb xyuas cov ntsiab lus tseem ceeb ntawm kev tshawb fawb thiab txiav txim siab nws lub peev xwm los vam meej lossis tsis ua tiav (Hnub & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015). Kev tsom xam cov ntsiab lus, ib qho cuab yeej los nthuav tawm cov kev tshawb fawb dav dav thiab cov lus qhia, hais txog kev muab tso ua ke ntawm cov ntsiab lus ntawm txhua yam kev tshaj tawm hauv ib lub npe (Dixit & Jakhar, 2021). Hauv txoj kev tshawb fawb tam sim no, peb faib cov ntsiab lus sib sau ua ke ua ob pawg (piv txwv li, txog 2010 thiab 2011-2021) txhawm rau tshawb nrhiav cov ncauj lus nrov tshaj plaws. Los ntawm kev ua qhov no, peb tuaj yeem taug qab cov ntsiab lus tseem ceeb hauv ob qho tib si thiab paub tseeb tias peb tau ntes tag nrho cov ntaub ntawv tsim nyog. Rau txhua qhov teeb tsa, kaum lo lus tseem ceeb tshaj plaws tau nthuav tawm hauv Table 3. Peb tshem tawm qhov tsis sib xws los ntawm kev sib koom ua ke cov ntsiab lus zoo ib yam, xws li "drone" thiab "drones" lossis, zoo ib yam, "Internet of Things" thiab "IoT."
Table 3 qhia tau hais tias "unmanned aerial tsheb" yog ib lo lus tseem ceeb siv ntau dua piv rau "drone" thiab "unmanned aerial system" nyob rau hauv ob lub sij hawm. Tsis tas li ntawd, "kev paub txog tej thaj chaw deb", "precision ua liaj ua teb," thiab "kev ua liaj ua teb" yog nyob rau hauv ob lub sijhawm. Nyob rau hauv thawj lub sij hawm, "precision ua liaj ua teb" nyob rau qib tsib, thiab nws nyob rau hauv lub thib ob nyob rau hauv lub thib ob lub sij hawm, uas qhia tau hais tias yuav ua li cas drones tau dhau los ua ib qho tseem ceeb nyob rau hauv kev ua tiav precision ua liaj ua teb raws li lawv muaj peev xwm saib xyuas,
kev tshawb nrhiav, thiab kev kwv yees kev coj ua sai dua, pheej yig dua, thiab ua tau yooj yim dua hauv kev sib piv nrog lwm cov chaw taws teeb-sensing thiab hauv av. Tsis tas li ntawd, lawv tuaj yeem tshuaj tsuag qhov tseeb ntawm cov tswv yim (xws li dej lossis tshuaj tua kab) thaum xav tau (Guo li al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
Daim ntawv teev cov ntsiab lus uas nquag siv.
nyob qib | 1990-2010 | No. ntawm tshwm sim | 2011-2021 | No. ntawm tshwm sim |
| 1 | unmanned dav hlau tsheb | 28 | unmanned aerial tsheb | 1628 |
| 2 | chaw pib sensing | 7 | precision ua liaj ua teb | 489 |
| 3 | ua liaj ua teb | 4 | chaw pib sensing | 399 |
| 4 | plav | 4 | drone | 374 |
| 5 | precision ua liaj ua teb | 4 | unmanned huab cua system | 271 |
| 6 | unmanned dav hlau | 4 | ua liaj ua teb | 177 |
| 7 | hyperspectral sensor | 3 | kawm tob | 151 |
| 8 | artificial neural Tes hauj lwm | 2 | tshuab kev kawm | 149 |
| 9 | autonomous ya davhlau | 2 | nroj tsuag Index | 142 |
| 10 | kas fes | 2 | Internet ntawm Tej yam uas | 124 |
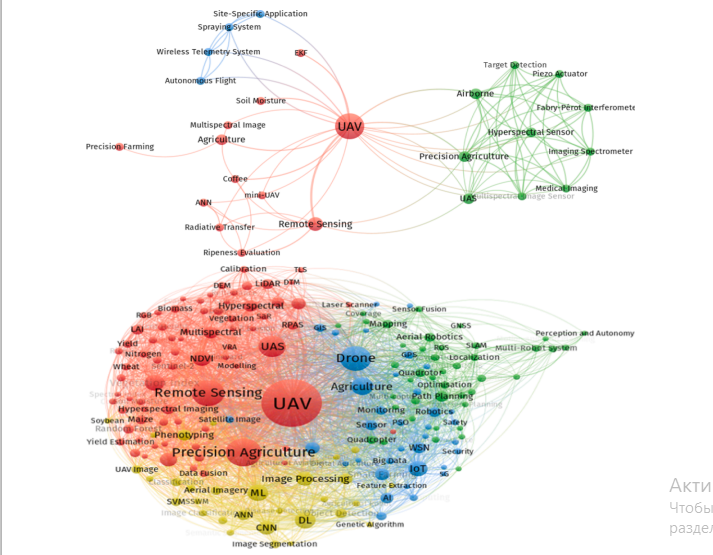
Lwm qhov nthuav dav yog qhov muaj cov thev naus laus zis ntxiv. Hauv thawj theem, "Hyperspectral Sensor" thiab "artificial neural networks" (ANN) yog ib qho ntawm kaum lo lus tseem ceeb. Hyperspectral imaging revolutionized ib txwm imaging los ntawm kev sau ib tug lossis loj tus naj npawb ntawm cov duab ntawm ntau wavelengths. Thaum ua li ntawd, cov sensors tuaj yeem sib sau ua ke cov ntaub ntawv spatial thiab spectral zoo dua piv rau cov duab thaij duab, spectroscopy, thiab RGB duab (Adao ˜ li al.,
2017). Qhov tshwm sim ntawm "ANN" hauv thawj theem thiab "kev kawm tob" (DL) thiab "kev kawm tshuab" (ML) nyob rau hauv qhov thib ob txhais tau hais tias feem ntau ntawm cov ntawv tshaj tawm tau tsom mus rau kev ntsuam xyuas lub peev xwm ntawm AI cov tswv yim rau drone- raws li kev ua liaj ua teb. Txawm hais tias cov drones muaj peev xwm ya autonomously, lawv tseem xav tau kev koom tes ntawm tus kws tsav dav hlau, uas qhia txog qib qis ntawm cov cuab yeej txawj ntse. Txawm li cas los xij, qhov teeb meem no tuaj yeem daws tau vim kev nce qib ntawm AI cov txheej txheem, uas tuaj yeem muab kev paub zoo dua thiab kev txiav txim siab tus kheej txhawb nqa. Nruab nrog AI, drones tuaj yeem zam kev sib tsoo thaum taug kev, txhim kho av thiab kev tswj hwm qoob loo (Inoue, 2020), thiab txo qis kev ua haujlwm thiab kev ntxhov siab rau tib neeg (BK Sharma li al., 2019).
Vim lawv qhov yooj yim thiab muaj peev xwm los tswj cov ntaub ntawv ntau yam tsis muaj kab, AI cov tswv yim tsim nyog los txheeb xyuas cov ntaub ntawv xa los ntawm drones thiab lwm yam kev paub txog tej thaj chaw deb thiab hauv av rau kev kwv yees thiab kev txiav txim siab (Ali li al., 2015; Xyoo, 2020). Tsis tas li ntawd, lub xub ntiag ntawm "IoT" nyob rau lub sijhawm thib ob qhia txog nws txoj haujlwm tseem ceeb hauv kev ua liaj ua teb. IoT yog hloov pauv kev ua liaj ua teb los ntawm kev sib txuas nrog lwm cov thev naus laus zis, suav nrog cov drones, ML, DL, WSNs, thiab cov ntaub ntawv loj. Ib qho txiaj ntsig tseem ceeb ntawm kev siv IoT yog nws lub peev xwm ua tau zoo thiab ua haujlwm zoo sib koom ua ke ntau yam dej num (kev nrhiav tau cov ntaub ntawv, kev txheeb xyuas cov ntaub ntawv thiab kev ua tiav, kev txiav txim siab, thiab kev siv) nyob ze lub sijhawm (Elijah li al., 2018; Feng li al. , 2019; Muangprathub et al., 2019). Tsis tas li ntawd, drones yog suav tias yog cov cuab yeej siv tau zoo rau kev ntes cov ntaub ntawv tsim nyog rau kev suav cov nroj tsuag lub zog thiab cov nroj tsuag (Candiago li al., 2015). Daim duab 2a thiab 2b qhia txog lo lus tseem ceeb ntawm kev sib koom ua ke rau ob lub sijhawm.
Influential sau ntawv
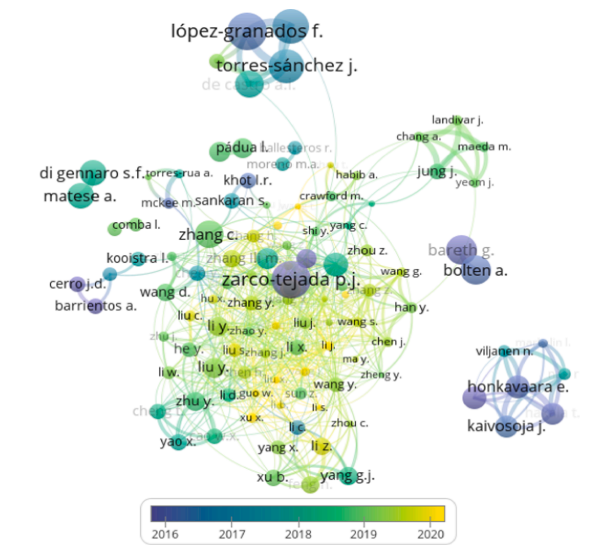
Hauv seem no, peb txiav txim siab cov kws sau ntawv muaj txiaj ntsig thiab tshuaj xyuas seb cov kws sau ntawv sau cia li cas tuaj yeem pom thiab teeb tsa cov ntaub ntawv tam sim no. Daim duab 3 qhia txog qhov sib tshooj ntawm txhua tus neeg tshawb fawb nrog cov ntawv sau ntau tshaj plaws. Cov xim nplai qhia txog qhov sib txawv ntawm xyoo ntawm cov neeg sau ntawv cov ntaub ntawv. Peb tshuaj xyuas cov qauv sau ntawv ntawm cov kws tshawb fawb uas luam tawm cov kev tshawb fawb ntawm kev ua liaj ua teb drones los ntawm kev siv qhov pib ntawm qhov tsawg kawg ntawm 50 cov ntawv pov thawj thiab kaum cov ntawv tshaj tawm. Tawm ntawm
12,891 tus sau, tsuas yog 115 tau ntsib tus mob no. Table 4 teev saum kaum tus kws sau ntawv muaj txiaj ntsig, txheeb los ntawm cov ntawv sau ntau tshaj plaws. Lopez-Granados F. coj cov npe nrog 1,963 cov ntawv sau tseg, ua raws li Zarco-Tejada PJ nrog 1,909 cov ntawv sau.
Daim ntawv teev cov neeg sau ntawv tshaj tawm.
| qeb duas | Sau | Citations |
| 1 | Lopez-Granados 'F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S anchez J. | 1,576 |
| 5 | Ferres E | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
Thaum nws los txog rau ib tus neeg tshaj tawm, Zhang thiab Kovacs's (2012) tsab xov xwm tau tshaj tawm txoj kev tshawb fawb tshaj tawm hauv Precision Agriculture. Ntawm no, cov kws sau ntawv tau tshuaj xyuas daim ntawv thov UAS hauv kev ua liaj ua teb precision. Cov kev tshawb pom ntawm lawv cov kev tshawb fawb qhia tau hais tias yuav tsum tau ua ntej platform tsim, ntau lawm, standardization ntawm cov duab georeferencing, thiab cov ntaub ntawv retrieval workflow los muab cov neeg ua liaj ua teb nrog kev ntseeg siab kawg cov khoom. Tsis tas li ntawd, lawv pom zoo kom koom nrog cov neeg ua liaj ua teb ntau zog, tshwj xeeb tshaj yog hauv kev npaj teb, kev ntes duab, nrog rau kev txhais cov ntaub ntawv thiab kev tshuaj xyuas. Qhov tseem ceeb, qhov kev tshawb fawb no yog thawj zaug los qhia txog qhov tseem ceeb ntawm UAV hauv daim duab qhia chaw, daim ntawv qhia lub zog, kev ntsuas cov ntsiab lus tshuaj, tshuaj xyuas cov nroj tsuag kev ntxhov siab, thiab kev ntsuam xyuas cov txiaj ntsig ntawm cov chiv rau kev loj hlob ntawm cov nroj tsuag. Cov teeb meem cuam tshuam nrog kev siv thev naus laus zis kuj suav nrog cov nqi txwv, kev muaj peev xwm sensor, platform ruaj khov thiab kev ntseeg tau, tsis muaj tus qauv tsim, thiab cov txheej txheem zoo ib yam los txheeb xyuas cov ntaub ntawv loj heev.
Kev tshuaj ntsuam xyuas
Citation tsom xam sawv cev rau kev kawm txog kev cuam tshuam ntawm cov khoom, txawm tias nws nquag ntws (piv txwv li, kev hais tsis ncaj ncees, kev hais tus kheej) yog suav tias yog ib qho ntawm cov cuab yeej siv rau kev ntsuas qhov cuam tshuam (Osareh, 1996; A. Rejeb li al., 2022; Sarli et al., 2010). Citations kuj qhia txog qhov tseem ceeb thiab qhov tseem ceeb ntawm cov ntaub ntawv kev koom tes rau cov ntaub ntawv ntawm ib lub ntsiab lus tshwj xeeb (R. Sharma li al., 2022). Peb tau ua ib qho kev soj ntsuam xyuas los txiav txim siab cov kev tshawb fawb muaj txiaj ntsig tshaj plaws ntawm kev ua liaj ua teb drones thiab sau cov ntsiab lus. Table 5 nthuav tawm cov npe ntawm kaum tsib cov ntawv tseem ceeb tshaj plaws rau lub sijhawm 1990-2010 thiab 2011-2021. Cov ntawv los ntawm Berni et al. (2009)b thiab Austin (2010) tau raug suav ntau tshaj plaws thaum xyoo 1990 thiab 2010, nrog 831 thiab 498 cov ntaub ntawv, raws li. Berni et al. (2009)b piav qhia txog lub peev xwm los tsim cov khoom lag luam ntau ntawm cov khoom siv los ntawm kev siv lub nyoob hoom qav taub UAV outfitted nrog pheej yig thermal thiab nqaim band multispectral imaging sensors. Piv nrog rau cov neeg ua haujlwm huab cua ib txwm muaj, cov nqi qis UAV rau kev ua liaj ua teb muaj peev xwm ua tiav qhov kev kwv yees sib piv ntawm biophysical tsis ntawm cov qoob loo, yog tias tsis zoo dua. Tus nqi pheej yig thiab kev ua haujlwm yooj yim, nrog rau qhov siab spectral, spatial, thiab lub cev kev daws teeb meem muaj nyob rau ntawm lub sijhawm hloov pauv sai, ua rau UAVs tsim nyog rau ntau yam kev siv uas xav tau kev tswj xyuas lub sijhawm tseem ceeb, suav nrog kev teem caij dej, thiab kev ua liaj ua teb precision. Daim ntawv los ntawm Berni et al. (2009) b tau raug suav hais tias zoo heev vim tias nws tau koom ua ke ib qho kev sib koom ua ke tsis muaj neeg ua haujlwm tis-tis platform thiab cov digital thiab thermal sensors nrog rau qhov tsim nyog calibration mechanisms rau kev ua liaj ua teb. Qhov thib ob tshaj tawm tshaj tawm yog phau ntawv sau los ntawm Austin (2010), uas tau tham txog UAVs los ntawm kev tsim, kev tsim kho, thiab kev xaav xaav. Hauv kev ua liaj ua teb, UAVs txhawb kev saib xyuas qoob loo los ntawm kev kuaj xyuas cov kab mob ntxov los ntawm cov qoob loo hloov xim, ua kom cov qoob loo sowing thiab txau, thiab saib xyuas thiab tsav cov tsiaj txhu.
Cov kev tshawb fawb ntawm Sullivan et al. (2007), Lumme et al. (2008), and Gokto ¨ ǧan et al. (2010) ua kom tiav cov npe ntawm kaum tsib cov lus tshaj tawm tshaj tawm. Cov kab lus no qhia txog kev txhim kho UAV-based systems los txhawb kev ua liaj ua teb. Lawv muab kev daws teeb meem rau ntau yam teeb meem, xws li kev saib xyuas qoob loo thiab tshuaj ntsuam xyuas, kev soj ntsuam cov nroj tsuag thiab kev tswj xyuas, thiab kev txiav txim siab txhawb nqa. Lawv kuj qhia thiab sib tham txog UAV lub peev xwm los txhim kho cov qauv kev ua tau zoo thiab pab cov neeg ua liaj ua teb hauv kev tsim kom raug thiab ua tau zoo
cog cov tswv yim. Ob daim ntawv tau sau los ntawm Berni (Berni li al., 2009b; Berni li al., 2009a), qhia txog nws qhov cuam tshuam loj rau kev tshawb fawb txog kev ua liaj ua teb. Daim ntawv los ntawm Zarco-Tejada et al. (2014) tau yog ib qho ntawm cov kev tshawb fawb pioneering los qhia txog qhov yuav tsum tau siv tus nqi qis UAV cov duab hauv tsob ntoo qhov siab kom muaj nuj nqis.
Cov npe ntawm cov ntawv tshaj tawm uas tau tshaj tawm.
| nyob qib | Los ntawm 1990 txog 2010 | Los ntawm 2011 txog 2021 | ||
| Daim ntawv | Citation | Daim ntawv | Citation | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kov, 2012) | 967 |
| 2 | (Austin, Kaum Ib Hlis 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt thiab al., 2010) | 331 | (Floreano & Ntoo, 2015) | 552 |
| 4 | (SR Herwitz li al., 2004) | 285 | (Hossein Motlagh thiab al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (Shakhatreh thiab al., 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig li al., 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad ˜ AW et al., 2017) | 335 |
| 10 | (Schmale III et al., ib. 2008) | 119 | (Honkavaara thiab al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago li al., 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan li al., 2007) | 51 | (Matese li al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago li al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
Nyob rau lub sijhawm thib ob (2011-2021), kev tshawb fawb los ntawm Zhang thiab Kovacs (2012) thiab Nex thiab Remondino (2014) ua rau cov ntawv tshaj tawm uas nquag tshaj tawm. Zhang thiab Kovacs (2012) sib cav hais tias kev ua liaj ua teb precision tuaj yeem tau txais txiaj ntsig los ntawm kev siv geospatial cov tswv yim thiab cov sensors, xws li cov ntaub ntawv xov xwm hauv thaj chaw, GPS, thiab kev paub txog tej thaj chaw deb, txhawm rau ntes cov kev hloov pauv hauv thaj chaw thiab tswj lawv los ntawm kev siv lwm txoj hauv kev. Raws li kev ua si-hloov pauv hauv kev ua liaj ua teb precision, kev saws me nyuam drones tau tshaj tawm lub hnub nyoog tshiab hauv kev paub txog tej thaj chaw deb, ua kom yooj yim rau kev soj ntsuam saum huab cua, khaws cov ntaub ntawv kev loj hlob qoob loo, av tej yam kev mob, thiab tshuaj tsuag thaj chaw. Kev tshuaj xyuas ntawm Zhang thiab Kovacs (2012) yog qhov tsis txaus ntseeg vim tias nws muaj kev nkag siab rau UAVs los ntawm kev nthuav tawm cov kev siv uas twb muaj lawm thiab cov teeb meem ntawm cov cuab yeej no hauv kev saib xyuas ib puag ncig thiab kev ua liaj ua teb, xws li kev txwv platform thiab lub koob yees duab, cov ntaub ntawv kev sib tw, kev koom tes ua liaj ua teb, thiab aviation cov cai. . Qhov thib ob
feem ntau hais txog kev tshawb fawb los ntawm Nex thiab Remondino (2014) tau tshuaj xyuas lub xeev ntawm kev kos duab ntawm UAVs rau kev ntes, ua, thiab txheeb xyuas cov duab hauv ntiaj teb.
Lawv txoj haujlwm kuj tau nthuav tawm cov ntsiab lus ntawm ntau lub UAV platforms, kev siv, thiab siv cov ntaub ntawv, qhia txog qhov kev nce qib tshiab tshaj plaws hauv UAV cov duab ua. Hauv kev ua liaj ua teb, cov neeg ua liaj ua teb tuaj yeem siv UAVs los txiav txim siab kom ua tiav cov nqi thiab sijhawm txuag, tau txais cov ntaub ntawv ceev thiab meej ntawm kev puas tsuaj, thiab cia siab tias yuav muaj teeb meem. Nyob rau hauv sib piv rau cov pa dav hlau platforms, UAVs tuaj yeem txiav cov nqi khiav lag luam thiab txo qis kev txaus ntshai ntawm kev nkag mus rau hauv qhov chaw hnyav thaum tseem khaws cia siab muaj peev xwm. Lawv daim ntawv qhia txog ntau yam zoo ntawm UAVs, tshwj xeeb tshaj yog hais txog qhov raug thiab daws teeb meem.
Ntawm kaum peb cov ntawv tshaj tawm uas tseem tshuav nyob nruab nrab ntawm 2011 thiab 2021, peb pom muaj kev xav ntau dua ntawm kev tshawb fawb txuas nrog cov ntawv thov drone hauv kev ua haujlwm ua haujlwm (Bendig li al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014) , precision kev ua liaj ua teb (Candiago li al., 2015; Honkavaara li al., 2013a), precision viticulture (Matese li al., 2015), kev ntsuas dej (Gago li al., 2015), thiab kev saib xyuas zaub (Aasen et al. , 2015 a). Thaum ntxov xyoo, cov kws tshawb fawb tsom
ntxiv rau kev tsim cov nqi qis, lub teeb yuag, thiab meej UAV-based systems rau kev ua liaj ua teb; Kev tshawb fawb tsis ntev los no tau tsom ntau dua rau kev tshuaj xyuas cov ntawv thov UAV rau kev ua liaj ua teb thiab kev tshawb fawb hauv teb. Hauv cov ntsiab lus, qhov kev tshuaj xyuas no nthuav tawm tias cov ntawv tshaj tawm muaj txiaj ntsig feem ntau tau muab kev tshuaj xyuas ntawm cov kev tshawb fawb ua ntej los ntsuas UAVs 'kev tshawb fawb thiab thev naus laus zis tam sim no thiab tsim UAV systems los txhawb kev ua liaj ua teb precision. Interestingly, peb tsis pom cov kev tshawb fawb uas ua hauj lwm empirical
methodologies los yog piav qhia txog cov ntaub ntawv tshawb fawb, uas yog qhov sib txawv ntawm kev paub tseem ceeb thiab hu rau kev tshawb fawb ntxiv ntawm cov ncauj lus no.
Kev txheeb xyuas kev sib tham
Raws li Gmür (2006), co-citation tsom xam txheeb xyuas cov ntaub ntawv zoo sib xws thiab pab pawg. Ua tib zoo tshuaj xyuas ntawm ib pawg tuaj yeem nthuav tawm ib qho kev tshawb fawb ntawm cov ntawv tshaj tawm. Peb tshawb xyuas qhov sib koom ua ke ntawm cov ntaub ntawv hais txog kev ua liaj ua teb drones los piav qhia txog cov kev kawm thiab tshawb xyuas cov qauv kev txawj ntse ntawm kev tshaj tawm. Hauv qhov no, Small (1973) pom zoo kom siv cov kev tsom xam cocitation los kawm txog cov kev tshawb fawb tshaj plaws thiab cov lus qhuab qhia.
nyob rau hauv ib txoj kev qhuab qhia. Txhawm rau txwv qhov teeb tsa rau feem ntau cov lus tshaj tawm (Goyal & Kumar, 2021), peb tau teeb tsa qhov sib koom ua ke ntawm 25, txhais tau hais tias ob tsab xov xwm yuav tsum tau muab sau ua ke hauv cov npe siv ntawm 25 lossis ntau dua cov ntawv tshaj tawm sib txawv. Kev sib koom ua ke kuj tau ua nrog qhov tsawg kawg ntawm pawg loj 1 thiab tsis muaj txoj hauv kev rau kev sib koom ua ke me me nrog cov loj dua. Yog li ntawd, rau pawg tau tsim tawm raws li qhov sib xws ntawm cov kev tshawb fawb thiab lawv cov qauv kev txawj ntse. Table 6 qhia txog kev faib cov ntawv tshaj tawm hauv txhua pawg.
Pawg 1: Pawg no muaj kaum yim cov ntaub ntawv luam tawm tom qab Cov ntawv tshaj tawm hauv pawg no tham txog lub luag haujlwm ntawm drones hauv kev txhawb nqa kev saib xyuas ib puag ncig, kev tswj qoob loo, thiab kev tswj cov nroj tsuag. Piv txwv li, Manfreda et al. (2018) muab cov ntsiab lus ntawm kev tshawb fawb tam sim no thiab kev siv ntawm UAV hauv kev saib xyuas kev ua liaj ua teb ntuj thiab sib cav tias cov thev naus laus zis muaj peev xwm loj heev los txhim kho ib puag ncig saib xyuas thiab txo qis.
qhov sib txawv uas twb muaj lawm ntawm kev soj ntsuam teb thiab cov pa cua thiab spaceborne tej thaj chaw deb sensing. Qhov no tuaj yeem ua tau los ntawm kev muab lub peev xwm tshiab rau kev txhim kho lub cev mus rau lub cev thiab kev nkag siab txog thaj chaw loj hauv txoj kev pheej yig. UAVs tuaj yeem hnov txog ib puag ncig thiab xa cov ntaub ntawv tshwm sim mus rau cov neeg txawj ntse, hauv nruab nrab / nruab nrab cov koom haum uas tswj cov sensors txhawm rau txheeb xyuas cov teeb meem tshwm sim, xws li tsis muaj kab mob lossis kev kuaj dej (Padua ´ li al., 2017). Adao ˜ et al. (2017) pom zoo tias UAVs yog qhov zoo tshaj plaws rau kev ntsuas cov nroj tsuag cov xwm txheej los ntawm kev ntes cov ntaub ntawv nyoos uas muaj feem xyuam nrog dej, kev kwv yees biomass, thiab kev ntsuam xyuas muaj zog. UAV-mounted sensors kuj tseem tuaj yeem xa mus sai sai rau hauv ib puag ncig zoo kom tso cai rau lub sijhawm ntes cov ntaub ntawv nyob deb-sensing (Von Bueren li al., 2015). Los ntawm txoj kev ntawm UAVs, cov neeg ua liaj ua teb muaj peev xwm ua tiav kev ua liaj ua teb sab hauv tsev los ntawm kev tau txais kev ntsuas los ntawm kev xyaum txhua qhov chaw hauv peb qhov chaw ua liaj ua teb sab hauv tsev (xws li, tsev cog khoom), yog li ua kom muaj kev tswj hwm huab cua hauv zos thiab saib xyuas cov nroj tsuag (Roldan ' li al. ., 2015). Nyob rau hauv cov ntsiab lus ntawm precision
Kev txiav txim siab txog kev ua liaj ua teb, kev tswj qoob loo yuav tsum muaj cov ntaub ntawv cog qoob loo muaj tseeb, txhim khu kev qha nrog kev daws teeb meem ntawm lub cev thiab qhov chaw (Gebbers & Adamchuk, 2010; Gevaert li al., 2015; Maes & Steppe, 2019). Vim li no, Agüera Vega li al. (2015) siv UAV-mounted multispectral sensor system kom tau txais cov duab ntawm paj paj noob hlis thaum lub caij loj hlob. Ib yam li ntawd, Huang et al. (2009) nco ntsoov tias cov chaw taws teeb sensing raws li UAVs tuaj yeem pab txhawb kev ntsuas cov qoob loo thiab av los ntawm cov ntaub ntawv khaws tseg spectral. Verger et al. (2014) tau tsim thiab sim cov txheej txheem rau kev kwv yees thaj chaw ntsuab index (GAI) los ntawm UAV kev ntsuas ntsuas hauv kev ua liaj ua teb precision, tsom rau cov nplej thiab cov qoob loo rapeseed. Yog li ntawd, drones muab qhov muaj peev xwm tshiab rau kev khaws cov ntaub ntawv hauv xeev cov qoob loo nrog kev rov mus xyuas ntau zaus thiab kev daws teeb meem siab (Dong li al., 2019; Garzonio li al., 2017; H. Zheng li al., 2016).
Clustering ntawm influential tshaj tawm ntawm kev ua liaj ua teb drones.
| pawg | Lub ntsiab lus dav | References |
| 1 | Kev saib xyuas ib puag ncig, qoob loo kev tswj, kev tswj cov nyom | (Ad ˜ ao et al., 2017; Agüera Vega thiab al., 2015; de Castro thiab al., 2018; Gomez-Cand ´on´ li al., 2014; YB Huang et al., 2013; Khanal thiab al., 2017; Lopez-Granados, ' 2011; Manfreda thiab al., 2018; P' adua et al., 2017; Pena ˜ et al., 2013; P'erez-Ortiz thiab al., 2015; Rasmussen thiab al., 2013, 2016; Torres-S anchez et al., 2014; Torres-Sanchez, 'Lopez-Granados, ' & Pena, ˜ 2015; Verger li al., 2014; Von Bueren li al., 2015; C. Zhang & Kov, 2012) |
| 2 | Tej thaj chaw deb phenotyping, tawm los Kev kwv yees, qoob loo tus qauv, suav cov nroj tsuag | (Bendig li al., 2013, 2014; Geipel thiab al., 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab thiab al., 2016; Holman li al., 2016; Jin thiab al., 2017; W. Li et al., 2016; Maimaijiang et al., 2017; Sankaran thiab al., 2015; Schirrmann li al., 2016; Shi et al., 2016; Yue et al., 2017; X. Zhou et al., 2017) |
| 3 | Thermal duab rau dej, multispectral duab | (Baluja li al., 2012; Berni et al., 2009b; Berni et al., 2009a; Candiago thiab al., 2015; Gago thiab al., 2015; Gonzalez-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; Khaliq thiab al., 2019; Matese li al., 2015; Ribeiro-Gomes li al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | Hypersectral duab, spectral kev ntsuam xyuas | (Aasen li al., 2015a; Bareth et al., 2015; Hakala et al., 2013; Honkavaara et al., 2013a; Lucieer thiab al., 2014; Saari et al., 2011; Suomalainen et al., 2014) |
| 5 | 3D-Mapping daim ntawv thov | (Jim'enez-Brenes li al., 2017; Nex & Remondino, 2014; Salamí thiab al., 2014; Torres-S Anchez, Lopez-' Granados, Serrano, thiab al., 2015; Zahawi et al., 2015; Zarco-Tejada thiab al., 2014) |
| 6 | Kev soj ntsuam ua liaj ua teb | (SR Herwitz li al., 2004; Hunt thiab al., 2010; CCD Lelong et al., 2008; Primicerio li al., 2012; Xiang & Tian, 2011) |
Tsis tas li ntawd, cov drones muaj txiaj ntsig zoo rau cov haujlwm nyuaj hauv kev ua liaj ua teb, suav nrog kev cog qoob loo. Cov duab ntes tau los ntawm cov cuab yeej tau ua pov thawj tias lawv muaj txiaj ntsig zoo rau kev tshawb nrhiav cov nroj tsuag thaum ntxov (de Castro li al., 2018; Jim'enez-Brenes li al., 2017; Lam et al., 2021; Lopez-Granados ' li al., 2016; Rozenberg et al., 2021). Hauv qhov no, de Castro et al. (2018) pom zoo tias kev sib koom ua ke ntawm UAV cov duab thiab Cov Khoom Siv Raws Li Kev Tshawb Fawb (OBIA) tau ua rau cov kws kho mob tuaj yeem kov yeej qhov teeb meem ntawm kev tshawb nrhiav thaum ntxov hauv cov qoob loo cog qoob loo thaum ntxov, uas yog ib kauj ruam loj rau hauv kev tshawb fawb nroj tsuag. Ib yam li ntawd, Pena ˜ et al. (2013) taw qhia tias kev siv ultra-high spatial daws teeb meem cov duab los ntawm UAV ua ke nrog cov txheej txheem OBIA ua rau nws muaj peev xwm tsim cov ntawv qhia zaub mov hauv cov qoob loo thaum ntxov uas tuaj yeem siv los npaj kev siv tshuaj tiv thaiv kab mob hauv lub caij, ib txoj hauj lwm tshaj lub peev xwm ntawm satellite thiab ib txwm huab cua dluab. Piv nrog rau kev faib cov duab lossis cov cuab yeej tshawb nrhiav pom, cov txheej txheem semantic segmentation tau zoo dua ntawm cov haujlwm ua haujlwm ntawm cov nroj tsuag (J. Deng li al., 2020), yog li ua rau cov neeg ua liaj ua teb txhawm rau txheeb xyuas cov xwm txheej hauv teb, txo qis, thiab txhim kho cov txiaj ntsig thoob plaws lub caij cog qoob loo (Ramesh et al., 2020). Kev kawm sib sib zog nqus raws li kev sib cais tseem tuaj yeem muab qhov ntsuas qhov tseeb ntawm cov nroj tsuag los ntawm cov duab saum toj kawg nkaus (Ramesh li al., 2020; A. Zheng li al., 2022). Txawm tias lawv muaj peev xwm rau tej thaj chaw deb
sensing pixel classifications, semantic segmentation techniques yuav tsum muaj kev suav tseem ceeb thiab lub cim xeeb GPU siab (J. Deng li al., 2020).
Raws li kev kawm tshuab thiab UAV, P'erez-Ortiz et al. (2015) tau hais qhia ib txoj hauv kev los tsim cov nroj tsuag los muab cov tswv yim tswj cov nroj tsuag tshwj xeeb thaum cov neeg ua liaj ua teb tau txais kev tswj cov nroj tsuag thaum ntxov. Thaum kawg, Rasmussen et al. (2013) tau hais tias drones muab pheej yig sensing nrog zoo spatial daws tau yooj yim. Zuag qhia tag nrho, cov ntawv tshaj tawm hauv pawg no tsom mus rau kev tshawb nrhiav qhov muaj peev xwm ntawm UAVs los txhawb kev paub txog tej thaj chaw deb, kev saib xyuas qoob loo, thiab kev cog qoob loo. Kev tshawb fawb ntxiv rau qhov tob yog xav tau los tshawb xyuas ntxiv seb yuav siv drone li cas hauv kev saib xyuas ib puag ncig, kev tswj cov qoob loo, thiab kev cog qoob loo tuaj yeem ua tiav kev ua liaj ua teb kom ruaj khov (Chamuah & Singh, 2019; Islam li al., 2021; Popescu et al., 2020; J . Su, Liu, et al., 2018) thiab hais txog cov teeb meem kev tswj hwm ntawm cov thev naus laus zis no hauv daim ntawv thov kev tuav pov hwm qoob loo (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). Cov kws tshawb fawb yuav tsum ua tib zoo saib xyuas cov kev ntsuas UAV sau nrog cov txheej txheem ua tau zoo los txhim kho qhov zoo tshaj plaws ntawm cov ntaub ntawv ua tiav (Manfreda li al., 2018). Tsis tas li ntawd, kev txhim kho cov txheej txheem tsim nyog uas paub txog cov pixels uas tso saib cov nroj tsuag hauv cov duab digital thiab tshem tawm cov keeb kwm yav dhau tsis cuam tshuam thaum lub sijhawm UAV cov nroj tsuag yuav tsum tau ua (Gaˇsparovi´c li al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; Lopez- ´ Granados et al., 2016). Kev tshawb fawb ntxiv txog kev txais yuav cov txheej txheem semantic segmentation hauv kev paub txog cov nroj tsuag, kev faib cov nplooj, thiab kab mob kab mob tau txais tos (Fuentes-Pacheco li al., 2019; Kerkech li al., 2020).
Pawg 2. Cov ntawv tshaj tawm hauv pawg no tau tsom mus rau ntau yam ntawm cov drones ua liaj ua teb. Muaj feem xyuam rau tej thaj chaw deb phenotyping, Sankaran li al. (2015) tau tshuaj xyuas lub peev xwm ntawm kev siv qis-qhov siab, siab daws teeb meem saum huab cua nrog UAVs rau kev ceev phenotyping ntawm cov qoob loo hauv thaj teb, thiab lawv sib cav tias, piv rau hauv av-raws li platforms, UAVs me me nrog cov sensors txaus muaj ntau qhov zoo. , xws li kev nkag tau yooj yim rau hauv thaj teb, cov ntaub ntawv daws teeb meem siab, cov ntaub ntawv sau tau zoo,
Kev soj ntsuam ceev ceev ntawm thaj chaw kev loj hlob, thiab cov nqi ua haujlwm qis. Txawm li cas los xij, cov kws sau ntawv kuj tseem nco ntsoov tias qhov kev siv tau zoo ntawm UAV rau kev ua haujlwm phenotyping yog nyob ntawm ob lub hauv paus ntsiab lus, uas yog, UAV nta (xws li, kev nyab xeeb, kev ruaj ntseg, qhov chaw, kev ywj pheej) thiab cov yam ntxwv ntawm cov sensor (xws li kev daws teeb meem, qhov hnyav, spectral wavelengths, teb. ntawm saib). Haghighattalab et al. (2016) tau tshaj tawm ib qho kev siv hluav taws xob semi-automated imageprocessing pipeline kom khaws cov ntaub ntawv theem ntawm UAV cov duab thiab ua kom cov txheej txheem yug me nyuam. Holman et al. (2016) txhim kho siab
throughput teb phenotyping system thiab tseem ceeb tias UAV muaj peev xwm sau tau zoo, voluminous, field-based phenotypic cov ntaub ntawv, thiab hais tias cov cuab yeej siv tau zoo rau thaj chaw loj thiab thoob plaws thaj chaw sib txawv.
Raws li kev kwv yees kwv yees yog ib qho tseem ceeb heev ntawm cov ntaub ntawv, tshwj xeeb tshaj yog thaum muaj nyob rau lub sij hawm, muaj peev xwm rau UAVs los muab tag nrho cov teb kev ntsuas thiab tau txais cov ntaub ntawv zoo (Daakir li al., 2017; Demir li al., 2018). ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012). Hauv qhov no, Jin et al. (2017) tau coj kom zoo dua ntawm cov duab daws teeb meem siab uas tau txais los ntawm UAVs ntawm qhov siab qis heev los txhim kho thiab ntsuam xyuas ib txoj hauv kev kwv yees cov cog qoob loo ntawm qhov tshwm sim. Raws li cov kws sau ntawv, UAVs kov yeej cov kev txwv ntawm rover tshuab nruab nrog lub koob yees duab thiab sawv cev rau txoj kev tsis muaj kev cuam tshuam los kwv yees cov qoob loo ntawm cov qoob loo, tso cai rau cov neeg ua liaj ua teb kom ua tiav cov txiaj ntsig siab tsim nyog rau kev ua liaj ua teb phenotyping ywj siab ntawm kev thauj mus los ntawm cov av. Li et al. (2016) tau sau ntau pua cov duab tso suab nrog cov kev daws teeb meem siab heev uas siv UAV-raws li kev kwv yees cov pob kws, suav nrog qhov siab ntawm qhov siab thiab saum av biomass. Thaum kawg, Yue et al. (2017) pom tias qoob loo qhov siab txiav txim siab los ntawm UAVs tuaj yeem txhim kho qhov kev kwv yees saum av biomass (AGB).
Ib txoj hauv kev los saib xyuas cov qoob loo loj hlob yog lub tswv yim ntawm kev tsim cov qauv qoob loo (Bendig li al., 2014, 2015; Holman li al., 2016; Panday, Shrestha, et al., 2020; Sumesh li al., 2021). Ntau qhov kev tshawb fawb qhia txog qhov ua tau ntawm cov duab coj los ntawm UAV los ntes cov nroj tsuag qhov siab thiab saib xyuas lawv txoj kev loj hlob. Piv txwv li, Bendig et al. (2013) tau piav qhia txog kev txhim kho ntawm cov qauv qoob loo ntawm ntau lub sijhawm nrog kev daws teeb meem siab heev ntawm tsawg dua 0.05 m siv UAV. Lawv tsom mus xyuas cov qoob loo
kev loj hlob variability thiab nws dependence rau kev kho qoob loo, cultivar, thiab kev nyuaj siab. Bendig et al. (2014) siv UAVs los kwv yees cov tshiab thiab qhuav biomass raws li cov nroj tsuag qhov siab tau muab rho tawm los ntawm cov qoob loo saum npoo qauv thiab pom tias, tsis zoo li cov platforms hauv huab cua thiab terrestrial laser scanning, cov duab siab daws teeb meem los ntawm UAVs tuaj yeem ua rau qhov tseeb ntawm cov nroj tsuag qhov siab ua qauv rau kev loj hlob sib txawv. theem. Nyob rau hauv tib txoj kev, Geipel li al. (2014) siv UAVs hauv lawv cov kev tshawb fawb kom tau txais cov duab
datasets rau pob kws nplej yield kwv yees ntawm peb theem sib txawv ntawm kev loj hlob thaum ntxov mus rau nruab nrab-lub caij thiab xaus lus tias kev sib xyaw ntawm spectral thiab spatial qauv raws li cov duab saum toj saud thiab cov qauv qoob loo saum npoo yog ib txoj hauv kev tsim nyog rau kev kwv yees nruab nrab lub caij nplooj ntoos hlav tawm los. Thaum kawg, Gnadinger ¨ thiab Schmidhalter (2017) tau tshuaj xyuas cov nqi hluav taws xob ntawm UAV hauv qhov tseeb phenotyping thiab tau hais tias kev siv cov thev naus laus zis no tuaj yeem txhim kho kev tswj hwm kev ua liaj ua teb thiab ua kom muaj kev sim teb rau kev yug me nyuam thiab agronomic lub hom phiaj. Zuag qhia tag nrho, peb pom tias cov ntawv tshaj tawm hauv pawg 2 tsom rau qhov txiaj ntsig tseem ceeb ntawm UAVs hauv cov chaw taws teeb
phenotyping, yield estimation, crop nto modeling, thiab cog suav. Cov kev tshawb fawb yav tom ntej tuaj yeem khawb ntxaum los ntawm kev tsim cov txheej txheem tshiab rau cov chaw taws teeb phenotyping uas tuaj yeem siv tau thiab ua kom zoo rau kev ua cov ntaub ntawv nyob deb (Barabaschi li al., 2016; Liebisch li al., 2015; Mochida et al., 2015; S. Zhou et al. Ib., 2021). Tsis tas li ntawd, kev ua tau zoo ntawm IoT sensors mounted ntawm UAVs thiab kev lag luam tawm ntawm lawv cov nqi, kev ua haujlwm, thiab qhov tseeb ntawm kev kwv yees kwv yees yuav tsum tau tshawb fawb hauv
yav tom ntej (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). Thaum kawg, yuav tsum tau tsim cov duab ua tau zoo uas tuaj yeem tsim cov ntaub ntawv txhim khu kev qha, ua kom muaj txiaj ntsig zoo hauv kev ua liaj ua teb, thiab txo qis kev suav cov neeg ua liaj ua teb (RU Khan li al., 2021; Koh et al., 2021; Lin & Guo, 2020; C. Zhang et al., 2020).
Cluster 3. Cov ntawv tshaj tawm hauv pawg no sib tham txog ntau hom kev yees duab rau kev paub txog tej thaj chaw deb ntawm kev ua liaj ua teb siv rau ntawm UAV platforms. Hauv qhov no, thermal imaging tso cai rau kev saib xyuas ntawm qhov kub thiab txias los tiv thaiv cov qoob loo puas tsuaj thiab tshawb xyuas kev ntxhov siab thaum ntxov (Awais li al., 2022; García-Tejero li al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021). Baluja et al. (2012) tau lees tias kev siv cov koob yees duab multispectral thiab thermal onboard lub
UAV enabled cov kws tshawb fawb kom tau txais cov duab daws teeb meem siab thiab ntsuas cov dej vine. Qhov no tuaj yeem pab tau los tsim cov qauv kev teem caij dej tshiab uas siv cov ntaub ntawv qhia txog tej thaj chaw deb (Baluja li al., 2012). Yog vim li cas
txwv load peev ntawm UAVs, Ribeiro-Gomes et al. (2017) tau txiav txim siab txog kev sib koom ua ke ntawm cov koob yees duab uas tsis muaj cua sov rau hauv UAVS los txiav txim siab txog dej hauv cov nroj tsuag, uas ua rau hom UAVs no muaj txiaj ntsig zoo thiab siv tau ntau dua li ib txwm siv satellite-raws li chaw taws teeb sensing thiab UAVs nruab nrog lub koob yees duab cua txias. Raws li cov kws sau ntawv, cov koob yees duab thermal uas tsis muaj cua sov yog sib zog dua li cov koob yees duab txias, xav tau kev ntsuas kom tsim nyog. Gonzalez-Dugo et al. (2014) tau pom tias thermal imagery ua tau zoo tsim cov duab qhia chaw ntawm cov qoob loo kev ntxhov siab rau kev ntsuas dej thiab ntsuas qhov kev ntxhov siab ntawm cov dej hauv cov txiv hmab txiv ntoo. Gonzalez-Dugo et al. (2013) thiab Santesteban et al. (2017) tau tshawb xyuas kev siv cov kev daws teeb meem siab UAV thermal imagery los kwv yees cov dej xwm txheej hloov pauv ntawm lub vaj txiv hmab txiv ntoo thiab lub vaj txiv hmab.
Multispectral imaging tuaj yeem muab cov ntaub ntawv loj hauv kev sib piv nrog cov duab RGB (Liab, Ntsuab, thiab Xiav) (Ad˜ ao et al., 2017; Navia et al., 2016). Cov ntaub ntawv spectral no, nrog rau cov ntaub ntawv spatial, tuaj yeem pab hauv kev faib tawm, kev qhia, kev kwv yees, kev kwv yees, thiab kev tshawb pom lub hom phiaj (Berni li al., 2009b). Raws li Candiago et al. (2015), UAVbased multispectral imaging tuaj yeem pab txhawb kev loj hlob rau kev soj ntsuam qoob loo thiab kev ua liaj ua teb meej raws li kev ntseeg tau thiab muaj txiaj ntsig zoo. Tsis tas li ntawd,
Khaliq et al. (2019) ua qhov sib piv ntawm satellite thiab UAVbased multispectral imaging. UAV-raws li cov duab tau ua kom meej meej hauv kev piav qhia txog vineyard variability nrog rau cov ntawv qhia muaj zog rau sawv cev cov qoob loo. Hauv cov ntsiab lus, cov khoom hauv pawg no tham txog kev koom ua ke ntawm thermal thiab multispectral imaging sensors rau hauv kev ua liaj ua teb UAVs. Yog li, kev tshawb fawb ntxiv yog xav tau kom nkag siab tias thermal thiab multispectral imaging tuaj yeem ua ke nrog AI
Cov tswv yim (piv txwv li, kev kawm tob) txhawm rau txheeb xyuas cov nroj tsuag kev ntxhov siab (Ampatzidis li al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). Cov kev pom zoo li no yuav pab xyuas kom muaj txiaj ntsig zoo thiab tshawb pom tseeb ntxiv nrog rau kev saib xyuas cov nroj tsuag kev loj hlob, kev ntxhov siab, thiab phenology (Buters li al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
Pawg 4. Cov pawg no muaj xya daim ntawv uas tig mus rau lub luag haujlwm tseem ceeb ntawm spectral imaging thiab hyperspectral imaging hauv kev txhawb nqa kev ua liaj ua teb. Hyperspectral imaging tau tsim nws tus kheej raws li ib tug tej thaj chaw deb-sensing txoj kev uas ua rau kom muaj nuj nqis kev ntsuam xyuas ntawm lub ntiaj teb system (Schaepman li al., 2009). Kom meej meej, nws enables tus txheeb xyuas cov ntaub ntawv nto, qhov ntau ntawm (kwv yees) concentrations, thiab qhov kev faib ua feem ntawm qhov chaw proportions
hauv cov pixels sib xyaw (Kirsch li al., 2018; Zhao li al., 2022). Hauv lwm lo lus, qhov kev daws teeb meem siab dua tau muab los ntawm cov tshuab hyperspectral ua rau muaj kev kwv yees ntau dua ntawm ntau yam tsis zoo, xws li cov khoom noj tsis noj nqaij lossis cov nplooj dej (Suomalainen et al., 2014). Cov kws tshawb fawb hauv pawg no tau tshawb xyuas ntau yam ntawm cov tshuab no. Ntawm lwm tus, Aasen et al. (2015b) muab ib txoj hauv kev tshwj xeeb rau kev muab cov ntaub ntawv peb-dimensional hyperspectral los ntawm lub teeb yuag
snapshot koob yees duab siv ntawm UAVs rau kev saib xyuas zaub. Lucieer et al. (2014) tau tham txog kev tsim, kev tsim kho, thiab kev ua haujlwm hauv huab cua ntawm qhov tshiab hyperspectral UAS nrog rau kev ntsuas, ntsuas, thiab txhais cov duab cov ntaub ntawv sau nrog nws. Thaum kawg, Honkavaara et al. (2013b) tau tsim ib qho kev ua tiav rau FabryPerot interferometer-raws li spectral spectral dluab thiab qhia nws siv nyob rau hauv ib tug biomass kwv yees txheej txheem rau precision ua liaj ua teb. Txoj hauv kev muaj peev xwm yav tom ntej rau pawg tam sim no suav nrog kev hais txog qhov xav tau kev txhim kho cov thev naus laus zis hauv cov thev naus laus zis (Aasen li al., 2015b) nrog rau kev xav tau rau kev sib koom ua ke thiab txhim kho cov thev naus laus zis ntxiv, tshwj xeeb cov ntaub ntawv loj thiab kev tshuaj xyuas (Ang & Seng, 2021; Radoglou -Grammatikis et al., 2020; Shakoor et al., 2019). Cov tom kawg feem ntau yog los ntawm cov ntaub ntawv loj hlob uas tau tsim los ntawm ntau lub sensors siv hauv kev ua liaj ua teb ntse (C. Li & Niu, 2020; A. Rejeb li al., 2022; Y. Su & Wang, 2021).
Pawg 5. Cov ntawv tshaj tawm hauv pawg no tau tshuaj xyuas cov ntawv thov siv drones raws li 3Dmapping. Kev siv cov drones rau 3D daim ntawv qhia tuaj yeem txo qhov kev ua haujlwm nyuaj thiab nce kev ua haujlwm tau zoo (Torres-Sanchez ´ li al., 2015). Tsib kab lus hauv pawg no tau tsom mus rau cov ntawv thov kev saib xyuas cov nroj tsuag. Piv txwv li, kom tau txais cov ntaub ntawv peb-dimensional hais txog thaj chaw canopy, tsob ntoo qhov siab, thiab crown ntim, Torres-Sanchez ´ li al. (2015) siv UAV thev naus laus zis los tsim cov qauv saum npoo digital thiab tom qab ntawd cov khoom siv duab tsom xam (OBIA) txoj hauv kev. Tsis tas li ntawd, Zarco-Tejada et al. (2014) quantified ntoo qhov siab los ntawm integrating UAV technology thiab peb-dimensional photo-reconstruction txoj kev. Jim'enez-Brenes Lopez-Granados, 'De Castro, et al. (2017) tau nthuav tawm cov txheej txheem tshiab rau ntau lub sijhawm, 3D saib xyuas ntawm kaum ob ntawm cov ntoo txiv ntseej los ntawm kev koom ua ke UAV thev naus laus zis nrog cov txheej txheem OBIA siab heev. Cov kev txaus siab rau kev ua haujlwm yav tom ntej hauv pawg no suav nrog kev txhim kho tam sim no
methodologies (Zarco-Tejada et al., 2014) rau lub hom phiaj ntawm cov qauv tsim qauv (Ajayi li al., 2017; Jaud li al., 2016), xws li OBIA (de Castro li al., 2018, 2020; Ventura li al. , 2018), thiab yees duab reconstruction los yog tsim tshiab txoj kev (Díaz-Varela li al., 2015; Torres-S' anchez li al., 2015).
Pawg 6. Pawg no tham txog lub luag haujlwm ntawm drones hauv kev soj ntsuam kev ua liaj ua teb. UAVs tuaj yeem ntxiv thiab kov yeej qhov tsis txaus ntawm satellite thiab dav hlau duab. Piv txwv li, lawv tuaj yeem muab cov kev daws teeb meem siab nyob ze ntawm lub sijhawm tiag tiag nrog cov roj tsawg lossis kev sim kev sib tw, ua rau muaj kev soj ntsuam tas li thiab lub sijhawm tiag tiag thiab txhim kho kev txiav txim siab (S. Herwitz li al., 2004). Lwm qhov kev pabcuam tseem ceeb ntawm UAVs yog lawv lub peev xwm los muab cov ntaub ntawv tshwj xeeb ntawm qhov chaw rau kev ua liaj ua teb lossis chaw ua liaj ua teb tshwj xeeb raws li lawv cov kev daws teeb meem siab, cov ntaub ntawv ntxaws txog ntau yam ua rau cov neeg ua liaj ua teb faib cov av rau hauv homogeneous thiab kho lawv raws li (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012). Xws li UAV-raws li kev soj ntsuam ua liaj ua teb tuaj yeem txhawb kev saib xyuas kev nyab xeeb thiab kev txiav txim siab (SR Herwitz li al., 2004). Txhawm rau ua tiav kev tshawb fawb hauv kev soj ntsuam kev ua liaj ua teb, tsis yog tsuas yog txhim kho hauv cov sensors, UAVs, thiab lwm yam kev siv thev naus laus zis thiab lawv cov kev sib txuas lus thiab cov ntaub ntawv hloov chaw yog xav tau (Ewing li al., 2020; Shuai et al., 2019), tab sis kuj tseem koom nrog cov drones nrog ntau yam. technologies rau optimizing ntau yam hauj lwm nyob rau hauv relation to ntse kev ua liaj ua teb, xws li kev soj ntsuam, ua liaj ua teb soj ntsuam, thiab txiav txim siab, yog ib tug muaj peev xwm tshawb fawb cheeb tsam (Alsamhi li al., 2021; Popescu li al., 2020; Vuran li al., 2018). Hauv qhov no, IoT, WSNs, thiab cov ntaub ntawv loj muaj peev xwm nthuav dav ntxiv (van der Merwe li al., 2020). Kev nqis tes ua, kev txuag nqi, kev siv hluav taws xob, thiab kev ruaj ntseg cov ntaub ntawv yog ib qho ntawm cov kev tshawb fawb hauv qab no rau kev sib koom ua ke (Masroor li al., 2021).
Lub teb chaws thiab cov tsev kawm ntawv
Cov kauj ruam kawg suav nrog kev tshawb nrhiav lub teb chaws ntawm keeb kwm thiab kev koom tes ntawm cov kws sau ntawv. Los ntawm qhov kev tshuaj ntsuam no, peb tsom kom nkag siab zoo dua thaj chaw faib ntawm cov kws tshawb fawb uas pab txhawb rau kev siv cov drones hauv kev ua liaj ua teb. Nws yog ib qho tseem ceeb kom pom qhov txawv ntawm cov teb chaws thiab cov tsev kawm ntawv. Los ntawm ib lub teb chaws foundations, lub teb chaws USA, Tuam Tshoj, Is Nrias teb, thiab Ltalis nyob rau saum toj ntawm cov npe nyob rau hauv cov nqe lus ntawm cov xov tooj ntawm cov ntaub ntawv (Table 7). Tam sim no
Kev tshawb fawb txog kev ua liaj ua teb drones feem ntau yog nyob rau hauv North American thiab Asian lub teb chaws, feem ntau yog vim lawv txoj kev koom tes hauv kev ua liaj ua teb precision. Piv txwv li, hauv Tebchaws Meskas, kev ua lag luam ntawm cov drones ua liaj ua teb tau kwv yees li ntawm 841.9 lab USD hauv xyoo 2020, suav txog kwv yees li 30% ntawm kev lag luam thoob ntiaj teb (ReportLinker, 2021). Raws li lub ntiaj teb kev lag luam loj tshaj plaws, Tuam Tshoj tau kwv yees kom ncav cuag kev lag luam kwv yees li ntawm 2.6 billion USD hauv xyoo 2027. Lub teb chaws no tau thov rau kev ua liaj ua teb drones kom kov yeej cov teeb meem tsim khoom thiab ua tiav cov txiaj ntsig zoo dua, kev txo qis zog, thiab kev tsim khoom tsawg dua. Txawm li cas los xij, kev siv thev naus laus zis hauv Suav teb kuj tau tsav los ntawm ntau yam xws li cov pej xeem loj thiab xav tau kev tsim kho tshiab thiab txhim kho cov kev coj noj coj ua uas twb muaj lawm.
Sab saum toj tshaj plaws tsim lub teb chaws thiab cov tsev kawm qib siab / koom haum uas pab txhawb rau
Kev tshawb fawb txog kev ua liaj ua teb drone.
| nyob qib | Lub teb chaws |
| 1 | TEB CHAWS USA |
| 2 | Tuam Tshoj |
| 3 | Is Nrias teb |
| 4 | Ltalis |
| 5 | Spain |
| 6 | Lub teb chaws Yelemees |
| 7 | Brazil |
| 8 | Australia |
| 9 | Nyiv |
| 10 | United Kingdom |
| nyob qib | Tsev kawm ntawv / Cov koom haum |
| 1 | Suav Kawm Txuj Ci |
| 2 | Ministry of Agriculture ntawm Tuam Tshoj |
| 3 | Consejo Superior de Kev Txiav Txim Siab Científicas |
| 4 | Texas A&M University |
| 5 | Tuam Tshoj Agricultural University |
| 6 | USDA Agricultural Research Service |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | Purdue University |
| 9 | National Research Council |
| 10 | South China Agricultural University |
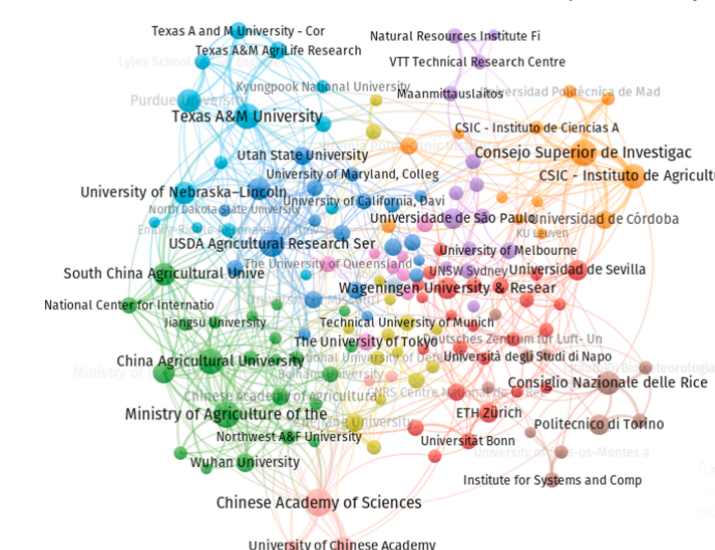
Los ntawm ib lub tsev kawm ntawv qib siab thiab lub koom haum saib, Suav Academy ntawm Kev Tshawb Fawb yog cov npe nyob rau hauv cov nqe lus ntawm cov ntawv tshaj tawm, ua raws li Ministry of Agriculture ntawm Tib Neeg Tuam Tshoj thiab Consejo Superior de Investigaciones Científicas. Suav Academy ntawm Sciences yog sawv cev los ntawm cov kws sau Liao Xiaohan thiab Li Jun; Han Wenting sawv cev rau Ministry of Agriculture ntawm Cov Neeg Sawv Cev ntawm Tuam Tshoj; thiab Consejo Superior de Investigaciones Científicas yog sawv cev los ntawm Lopez-Granados, 'F. thiab Pena, ˜ Jos'e María S. Los ntawm Asmeskas, cov tsev kawm qib siab xws li Texas A&M University thiab Purdue University nrhiav lawv.
hais. Cov tsev kawm ntawv qib siab uas muaj cov ntawv tshaj tawm ntau tshaj plaws thiab lawv cov kev sib txuas tau pom nyob rau hauv daim duab 4. Tsis tas li ntawd, cov npe no suav nrog cov tsev kawm ntawv xws li Consiglio Nazionale delle Ricerche thiab Consejo Superior de Investigaciones Científicas uas muaj kev tshawb fawb txog kev tshawb fawb, tab sis tsis yog cov tsev kawm ntawv. .
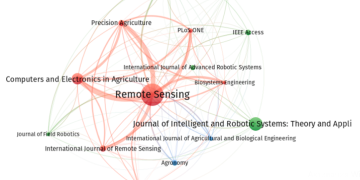
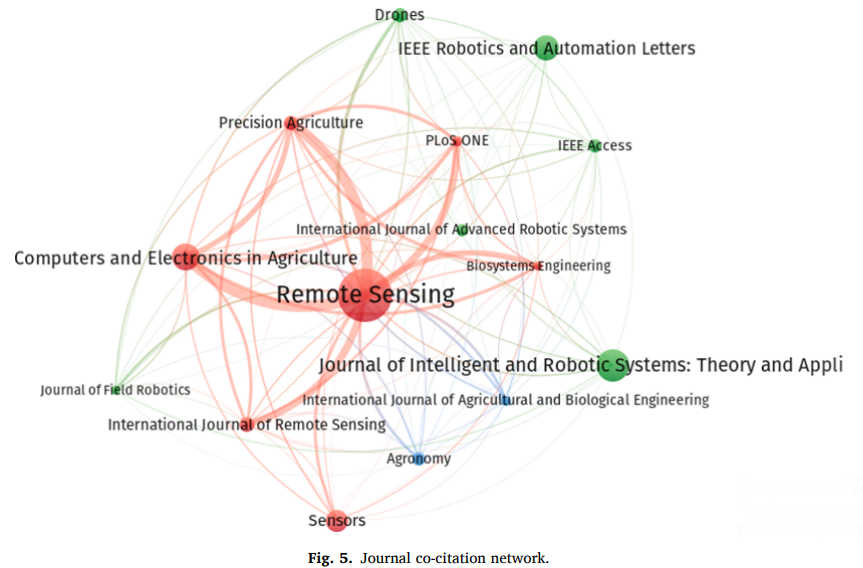
Peb cov kev xaiv suav nrog ntau hom ntawv sau cia, suav nrog txhua yam ntawm cov ntaub ntawv muaj. Raws li tau pom nyob rau hauv Table 8, Cov Chaw Taws Teeb Pom Zoo nrog 258 cov lus nyob rau saum toj, ua raws li Phau Ntawv Xov Xwm ntawm Kev Txawj Ntse thiab Robotic Systems: Txoj Cai thiab Cov Ntawv Thov nrog 126 thiab Computers thiab Electronics hauv Kev Ua Liaj Ua Teb nrog 98 tsab xov xwm. Thaum Chaw Taws Teeb Tseem Ceeb feem ntau yog tsom rau daim ntawv thov thiab kev loj hlob ntawm drones, Computers thiab Electronics hauv Kev Ua Liaj Ua Teb feem ntau suav nrog kev nce qib hauv computer hardware, software, electronics, thiab kev tswj hwm hauv kev ua liaj ua teb. Cov chaw muag khoom hla cheeb tsam, xws li IEEE Robotics thiab Automation Letters nrog 87 cov ntawv tshaj tawm thiab IEEE Access nrog 34 cov ntawv tshaj tawm, kuj tseem yog qhov chaw tshaj tawm hauv cheeb tsam. Kaum tsib qhov chaw tshaj tawm sab saum toj tau pab txhawb rau cov ntaub ntawv nrog 959 cov ntaub ntawv, uas yog kwv yees li 20.40% ntawm tag nrho cov ntawv tshaj tawm. Ib phau ntawv xov xwm kev sib koom ua ke ua rau peb tshawb xyuas qhov tseem ceeb thiab zoo sib xws ntawm cov ntawv tshaj tawm. Kev txheeb xyuas kev sib koom ua ke ua rau peb pawg, raws li qhia hauv daim duab 5. Cov pawg liab muaj cov ntawv xov xwm xws li Chaw Taws Teeb Pom Kev, Computer thiab Electronics hauv Kev Ua Liaj Ua Teb, Sensors,
thiab International Journal of Remote Sensing. Tag nrho cov chaw muag khoom no yog cov ntawv xov xwm muaj npe nrov hauv thaj chaw ntawm kev paub txog tej thaj chaw deb thiab kev ua liaj ua teb precision. Cov pawg ntsuab muaj cov ntawv xov xwm uas cuam tshuam nrog cov neeg hlau, xws li Phau Ntawv Xov Xwm ntawm Kev Txawj Ntse thiab Neeg Hlau: Txoj Cai thiab Kev Siv, IEEE Robotics thiab Automation Letters, IEEE Access, thiab Drones. Cov chaw lag luam no feem ntau tshaj tawm cov ntaub ntawv ntawm automation thiab muaj txiaj ntsig zoo rau cov kws ua haujlwm ua liaj ua teb. Cov pawg kawg yog tsim los ntawm cov ntawv xov xwm ntsig txog agronomy thiab engineering engineering, xws li Agronomy thiab International Journal of Agricultural thiab Biological Engineering.
Sab saum toj 15 phau ntawv xov xwm hauv kev tshawb fawb txog kev ua liaj ua teb drone.
| nyob qib | Journal | Suav |
| 1 | Tsaj Sij Hawm | 258 |
| 2 | Phau ntawv Journal of Intelligent and Robotic Systems: Theory and daim ntawv sau npe | 126 |
| 3 | Computers thiab Electronics hauv Kev Ua Liaj Ua Teb | 98 |
| 4 | IEEE Robotics thiab Automation Letters | 87 |
| 5 | Sensors | 73 |
| 6 | International Journal of Remote Sensing | 42 |
| 7 | Precision Ua Liaj Ua Teb | 41 |
| 8 | Drones | 40 |
| 9 | Agronomy | 34 |
| 10 | IEEE Nkag Mus | 34 |
| 11 | International Journal of Advanced Robotic Systems | 31 |
| 12 | International Journal of Agricultural thiab Biological Engineering | 25 |
| 13 | PLOS IB | 25 |
| 14 | Phau ntawv Journal of Field Robotics | 23 |
| 15 | Biosystems Engineering | 23 |
xaus
Ntsiab lus
Hauv txoj kev tshawb no, peb tau sau thiab txheeb xyuas cov kev tshawb fawb uas twb muaj lawm ntawm kev ua liaj ua teb drones. Siv ntau yam kev kawm bibliometric, peb siv zog kom tau txais kev nkag siab zoo ntawm cov qauv kev txawj ntse ntawm kev tshawb fawb txog kev ua liaj ua teb drone. Piv txwv li, peb qhov kev tshuaj xyuas muaj ntau qhov kev pab cuam los ntawm kev txheeb xyuas thiab sib tham txog cov lus tseem ceeb hauv cov ntaub ntawv, nthuav tawm cov kev paub hauv pawg thaum tsim cov zej zog zoo sib xws hauv thaj chaw ntawm drones, piav qhia txog kev tshawb fawb ua ntej, thiab qhia txog kev tshawb fawb yav tom ntej. Hauv qab no, peb piav qhia txog cov txiaj ntsig tseem ceeb ntawm kev tshuaj xyuas ntawm kev tsim cov drones ua liaj ua teb:
• Tag nrho cov ntaub ntawv tau loj hlob sai thiab tau txais kev nyiam ntau dhau los ntawm kaum xyoo dhau los, raws li tau hais los ntawm qhov nce ntawm cov ntawv tom qab xyoo 2012. Txawm hais tias qhov kev paub no tseem tsis tau muaj kev loj hlob tag nrho (Barrientos et al., 2011; Maes & Steppe, 2019), ntau cov lus nug tseem tsis tau teb. Piv txwv li, kev siv hluav taws xob ntawm drones hauv kev ua liaj ua teb sab hauv tsev tseem qhib rau kev sib cav (Aslan li al., 2022; Krul li al., 2021; Rold' an et al., 2015). Qhov nyuaj ntawm thaj chaw scenes thiab cov xwm txheej sib txawv (xws li, duab ntxoov ntxoo thiab teeb pom kev zoo) tuaj yeem ua rau muaj qhov sib txawv ntawm cov chav kawm ntau dua (Yao li al., 2019). Txawm tias nyob rau hauv cov theem tom qab kev tshawb fawb, cov kws tshawb fawb tau sib tw los txiav txim siab lub davhlau zoo raws li cov xwm txheej tshwj xeeb thiab xav tau cov duab zoo (Soares li al., 2021; Tu et al.,
2020).
• Peb pom tias thaj chaw tau nce qib los ntawm kev txhim kho UAV kom muaj txiaj ntsig zoo los koom nrog cov txheej txheem AI, xws li kev kawm tshuab thiab kev kawm tob hauv kev tsim cov drones ua liaj ua teb (Bah li al., 2018; Kitano et al., 2019; Maimaitijiang li al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• Kev tshawb fawb ntawm cov drones ua liaj ua teb feem ntau tau tham txog kev paub txog tej thaj chaw deb los ntawm kev tshawb nrhiav cov peev txheej ntawm cov thev naus laus zis hauv kev saib xyuas ib puag ncig, kev tswj cov qoob loo, thiab kev tswj cov nroj tsuag (pawg 1) nrog rau cov chaw taws teeb phenotyping thiab kev kwv yees tawm (pawg 2). Ib txheej ntawm kev tshawb fawb muaj txiaj ntsig ntawm kev ua liaj ua teb drones suav nrog Austin (2010), Berni li al. (2009) a, Herwitz et al. (2004), Nex thiab Remondino (2014), thiab Zhang thiab Kovacs (2012). Cov kev tshawb fawb no tau tsim lub hauv paus ntsiab lus ntawm kev tshawb fawb txog drone hauv cov ntsiab lus ntawm kev ua liaj ua teb.
• Muaj feem xyuam rau txoj kev, peb tau pom tias feem ntau ntawm cov kev tshawb fawb tau ua los txog tam sim no tau tsim los ntawm kev tsim qauv, kev xav, lossis kev tshuaj xyuas raws li kev tshawb fawb (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz li al. , 2015; Yao et al., 2019). Peb kuj pom tias tsis muaj qhov tsis zoo, qhov zoo, thiab cov txheej txheem tshawb fawb raws li kev ua haujlwm hauv kev tshawb xyuas cov drones ua liaj ua teb.
• Tsis ntev los no, cov ncauj lus hais txog kev ua liaj ua teb precision, AI cov tswv yim, precision viticulture, thiab kev ntsuas kev ntxhov siab hauv dej tau ua rau muaj kev txaus siab (Espinoza li al., 2017; Gomez-Cand ´on ´ li al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). Ua tib zoo tshuaj xyuas ntawm pawg tshawb fawb hauv ob lub sijhawm sib cais, 1990-2010 thiab 2011-2021, qhia txog kev nce qib ntawm cov qauv kev txawj ntse hauv lub tebchaws. Lub sijhawm txij li xyoo 1990 txog rau xyoo 2010 tau tsim cov kev xav hauv nruab nrab thiab cov ntsiab lus ntawm drones, uas yog pom tseeb los ntawm kev sib tham ntawm UAV tsim, kev tsim kho, thiab kev siv. Nyob rau lub sijhawm thib ob, kev tshawb fawb tsom mus rau kev tshawb fawb ua ntej, ua rau muaj kev sib koom ua ke ntawm UAV siv cov xwm txheej hauv kev ua liaj ua teb. Peb kuj pom ntau qhov kev tshawb fawb uas sib tham txog kev siv drone hauv kev ua haujlwm ua haujlwm thiab kev ua liaj ua teb precision.
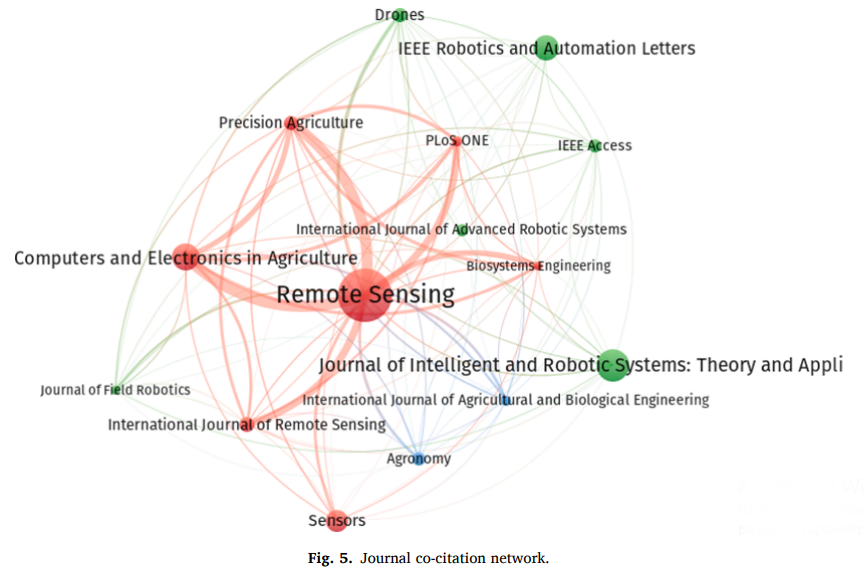
| nyob qib | Journal | Suav |
| 1 | Tsaj Sij Hawm | 258 |
| 2 | Phau ntawv Journal of Intelligent and Robotic Systems: Theory and | 126 |
| daim ntawv sau npe | ||
| 3 | Computers thiab Electronics hauv Kev Ua Liaj Ua Teb | 98 |
| 4 | IEEE Robotics thiab Automation Letters | 87 |
| 5 | Sensors | 73 |
| 6 | International Journal of Remote Sensing | 42 |
| 7 | Precision Ua Liaj Ua Teb | 41 |
| 8 | Drones | 40 |
| 9 | Agronomy | 34 |
| 10 | IEEE Nkag Mus | 34 |
| 11 | International Journal of Advanced Robotic Systems | 31 |
| 12 | International Journal of Agricultural thiab Biological Engineering | 25 |
| 13 | PLOS IB | 25 |
| 14 | Phau ntawv Journal of Field Robotics | 23 |
| 15 | Biosystems Engineering | 22 |
siv rau
Peb qhov kev tshuaj xyuas bibliometric tau tsim thiab ua nrog cov kws tshawb fawb, cov neeg ua liaj ua teb, cov kws paub txog kev ua liaj ua teb, cov kws pab tswv yim cog qoob loo, thiab UAV cov neeg tsim qauv hauv siab. Rau cov kws sau ntawv qhov kev paub zoo tshaj plaws, qhov no yog ib qho ntawm thawj qhov kev tshuaj xyuas thawj zaug uas tau ua tiav kev txheeb xyuas qhov tob hauv bibliometric ntawm
kev siv drone hauv kev ua liaj ua teb. Peb tau ua qhov kev tshuaj xyuas tag nrho ntawm lub koom haum kev paub no, ntiav cov ntaub ntawv pov thawj thiab kev sib koom ua ke ntawm cov ntawv tshaj tawm. Peb qhov kev sim piav qhia txog cov qauv kev txawj ntse ntawm kev tshawb fawb drone kuj muaj kev nkag siab tshiab rau kev kawm. Kev ua tib zoo tshuaj xyuas cov lus tseem ceeb uas siv sijhawm dhau los qhia txog cov hotspots thiab cov chaw tshawb fawb focal hauv cov ntaub ntawv hais txog drone. Tsis tas li ntawd, peb nthuav qhia cov npe ntawm cov kev tshawb fawb feem ntau los txheeb xyuas cov kev tshawb fawb muaj txiaj ntsig zoo tshaj plaws ua tiav hauv thaj chaw. Kev txheeb xyuas cov ntawv thiab cov ntsiab lus tseem ceeb tuaj yeem ua rau muaj qhov pib zoo los nthuav tawm ntau txoj hauv kev rau kev kawm yav tom ntej.
Qhov tseem ceeb, peb tau nthuav tawm cov pawg uas faib cov haujlwm sib piv thiab piav qhia txog cov txiaj ntsig. Cov kev tshawb fawb tau muab faib ua pawg pab kom nkag siab txog cov qauv kev txawj ntse ntawm kev tshawb fawb UAV. Qhov tseem ceeb, peb nrhiav pom qhov tsis txaus ntawm cov kev tshawb fawb uas tshawb xyuas cov drones 'kev saws me nyuam
thiab tej kev txwv hauv kev ua liaj ua teb (saib Table 9). Cov kws tshawb fawb yav tom ntej tuaj yeem hais daws qhov tsis sib xws los ntawm kev tshawb fawb txog qhov pom tseeb uas ntsuas cov drones 'kev coj noj coj ua hauv kev ua liaj ua teb sib txawv thiab cov xwm txheej huab cua. Tsis tas li ntawd, cov ntaub ntawv tshawb fawb-raws li kev tshawb fawb txog kev ua tau zoo ntawm drones yuav tsum tau rov qab nrog cov ntaub ntawv tiag tiag los ntawm thaj chaw. Tsis tas li ntawd, koom nrog cov neeg ua liaj ua teb thiab cov thawj coj hauv kev tshawb fawb kev kawm yuav zoo rau ob qho tib si theoretical thiab cov tswv yim nce qib ntawm kev tshawb fawb drone. Peb kuj tuaj yeem txheeb xyuas cov kws tshawb fawb tseem ceeb tshaj plaws thiab lawv cov kev koom tes, uas yog qhov tseem ceeb vim tias kev paub txog kev ua haujlwm tsis ntev los no tuaj yeem muab qee qhov kev taw qhia rau kev kawm yav tom ntej.
rooj 9
UAV adoption barriers.
| Teeb meem | Hauj lwm |
| Kev ruaj ntseg cov ntaub ntawv | Cyber Security yog qhov nyuaj rau kev siv IoT kev daws teeb meem (Masroor et al., 2021). |
| Kev sib koom tes thiab kev koom ua ke | Ntau yam thev naus laus zis xws li UAV, WSN, IoT, thiab lwm yam. yuav tsum tau integrated thiab xa cov ntaub ntawv uas nce qib complexity (Alsamhi li al., 2021; Popescu thiab al., 2020; Vuran et al., 2018). |
| Kev nqis tes ua | Qhov no yog qhov tshwj xeeb rau cov neeg ua liaj ua teb me thiab rau integrating ntau yam kev siv thev naus laus zis ( Masroor et al., 2021). |
| Kev paub txog kev ua haujlwm thiab kev txawj ntse | Cov kws tshaj lij drone xav tau los ua haujlwm UAVs. Tsis tas li ntawd, siv ntau yam kev txiav-ntug technologies xav tau cov neeg ua haujlwm txawj (YB Huang thiab al., 2013; Tsouros et al., 2019). |
| Cav fais fab thiab davhlau ntev | Drones tsis tuaj yeem ua haujlwm ntev ntev thiab npog thaj chaw loj (Hardin & Hardin, 2010; Laliberte li al., 2007). |
| Stability, kev cia siab, thiab maneuverability | Drones tsis ruaj khov thaum huab cua tsis zoo (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Payload txwv thiab sensors zoo | Drones tsuas muaj peev xwm nqa tau txwv tsis pub coj mus rau muaj peev xwm thauj khoom qis dua sensors (Nebiker li al., 2008). |
| tswj | Raws li drones tuaj yeem ua rau muaj kev phom sij thiab, muaj qhov hnyav cov cai hauv qee thaj chaw (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| Cov neeg ua liaj ua teb paub thiab paj | Raws li lwm yam kev siv thev naus laus zis, cov drones ' kev ua tiav yuav tsum muaj kev txawj ntse thiab nrog rau qhov tsis paub tseeb (Fisher li al., 2009; Lambert et al., 2004; Stafford, 2000). |
Txij li thaum muaj qhov yuav tsum tau ua kom muaj txiaj ntsig zoo siv cov peev txheej kom tau txais txiaj ntsig ntau tshaj plaws, cov neeg ua liaj ua teb tuaj yeem siv qhov zoo ntawm cov drones los xyuas kom meej sai, raug, thiab raug nqi ntsuas ntawm lawv cov teb. Cov thev naus laus zis tuaj yeem txhawb nqa cov neeg ua liaj ua teb los txiav txim siab lawv cov qoob loo 'kev mob thiab ntsuas dej, theem ntawm cov ripening, kab kab mob, thiab kev xav tau kev noj haus. Lub peev xwm ntawm kev paub txog tej thaj chaw deb ntawm drones tuaj yeem muab cov neeg ua liaj ua teb nrog cov ntaub ntawv tseem ceeb los xav txog cov teeb meem thaum ntxov thiab ua kom muaj kev cuam tshuam sai. Txawm li cas los xij, cov txiaj ntsig ntawm kev siv thev naus laus zis tsuas tuaj yeem paub yog tias cov kev cov nyom raug daws kom raug. Nyob rau hauv lub teeb ntawm lub
Cov teeb meem tam sim no hais txog kev ruaj ntseg ntawm cov ntaub ntawv, teeb meem kev siv tshuab (xws li, kev ntseeg siab lossis qhov tseeb ntawm kev ntsuas), kev sib koom ua ke, thiab cov nqi siv ntau heev, cov kev tshawb fawb yav tom ntej yuav tsum tau tshuaj xyuas cov txuj ci, kev lag luam, thiab kev ua haujlwm ntawm kev ua liaj ua teb drones thiab lwm yam kev txiav- ntug technologies.
Cov kev txwv
Peb txoj kev kawm muaj ntau yam kev txwv. Ua ntej, qhov kev tshawb pom yog txiav txim siab los ntawm cov ntawv tshaj tawm uas tau xaiv rau qhov kev ntsuam xyuas zaum kawg. Nws yog qhov nyuaj rau kev ntes tag nrho cov kev tshawb fawb ntsig txog kev ua liaj ua teb drones, tshwj xeeb tshaj yog cov tsis tau txheeb xyuas hauv Scopus database. Tsis tas li ntawd, cov txheej txheem sau cov ntaub ntawv raug txwv rau kev teeb tsa cov ntsiab lus tshawb nrhiav, uas yuav tsis suav nrog thiab ua rau kev tshawb pom tsis tiav. Yog li, cov kev tshawb fawb yav tom ntej yuav tsum tau them nyiaj ntau dua rau qhov teeb meem hauv qab ntawm kev sau cov ntaub ntawv los ua
kev ntseeg siab dua. Lwm qhov kev txwv cuam tshuam txog kev tshaj tawm tshiab uas muaj cov ntawv pov thawj tsawg. Kev tshuaj xyuas bibliometric yog qhov tsis ncaj ncees rau cov ntawv tshaj tawm ua ntej vim lawv nyiam tau txais cov ntawv sau ntau xyoo. Cov kev tshawb fawb tsis ntev los no xav tau qee lub sijhawm los nyiam cov neeg nyiam thiab sau cov ntawv sau cia. Yog li ntawd, cov kev tshawb fawb tsis ntev los no uas coj qhov kev hloov pauv hloov pauv yuav tsis nyob rau hauv kaum qhov kev ua haujlwm zoo tshaj plaws. Qhov kev txwv no muaj nyob rau hauv kev tshuaj xyuas ntawm cov kev tshawb fawb sai sai xws li kev ua liaj ua teb drones. Raws li peb tau sab laj Scopus los kawm cov ntaub ntawv rau txoj haujlwm no, cov kws tshawb fawb yav tom ntej tuaj yeem xav txog txawv
databases, xws li Web of Science thiab IEEE Xplore, kom nthuav dav lub qab ntug thiab txhim kho cov qauv kev tshawb fawb.
Cov kev tshawb fawb bibliometric muaj peev xwm yuav xav txog lwm yam kev paub tseem ceeb xws li cov ntaub ntawv sib tham, tshooj, thiab cov phau ntawv los tsim cov kev pom tshiab. Txawm hais tias daim ntawv qhia thiab tshawb xyuas thoob ntiaj teb cov ntawv tshaj tawm ntawm kev ua liaj ua teb drones, peb qhov kev tshawb pom tsis tau nthuav tawm cov laj thawj tom qab cov txiaj ntsig ntawm cov tsev kawm qib siab. Qhov no ua rau txoj hauv kev mus rau thaj chaw tshiab ntawm kev tshawb fawb hauv kev piav qhia zoo vim li cas qee lub tsev kawm ntawv qib siab muaj txiaj ntsig zoo dua li lwm tus thaum nws los tshawb fawb txog kev ua liaj ua teb.
drones. Tsis tas li ntawd, cov kev tshawb fawb yav tom ntej tuaj yeem muab kev nkag siab txog lub peev xwm ntawm drones txhawm rau txhim kho kev ua liaj ua teb nyob ruaj khov nyob rau ntau txoj hauv kev xws li kev saib xyuas ib puag ncig, kev tswj cov qoob loo, thiab kev cog qoob loo raws li qhia los ntawm ntau tus kws tshawb fawb (Chamuah & Singh, 2019; Islam li al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). Txij li cov ntawv nyeem tsis tuaj yeem ua tau vim muaj ntau cov ntaub ntawv xaiv, yuav tsum muaj kev tshuaj xyuas cov ntaub ntawv zoo uas tshuaj xyuas cov ntaub ntawv.
cov kev tshawb fawb siv thiab kev koom tes ntawm cov neeg ua liaj ua teb hauv kev tshawb fawb ua ntej. Hauv luv luv, peb qhov kev tshuaj xyuas ntawm kev tshawb fawb drone nthuav tawm qhov tsis pom kev sib txuas ntawm lub cev kev paub no. Qhov kev tshuaj xyuas no pab txhawm rau nthuav tawm kev sib raug zoo ntawm cov ntawv tshaj tawm thiab tshawb nrhiav cov qauv kev txawj ntse ntawm kev tshawb fawb. Nws kuj piav qhia txog kev sib txuas ntawm ntau yam ntawm cov ntaub ntawv, xws li cov neeg sau cov ntsiab lus, kev koom tes, thiab lub teb chaws.
Tshaj Tawm ntawm Kev Txaus Siab Kev Xav Tau
Cov sau phau ntawv tshaj tawm tias lawv tsis muaj kev paub txog kev sib tw nyiaj txiag lossis kev sib raug zoo uas yuav tshwm sim cuam tshuam txoj haujlwm hauv tsab ntawv no.
Lus Qhia Ntxiv 1
TITLE-ABS-KEY ((( drone * OR "unmanned aerial tsheb" OR uav * OR "unmanned aircraft system"OR uas LOSSIS “cov dav hlau tsav dav hlau”) THIAB (ua liaj ua teb lossis ua liaj ua teb lossis ua liaj ua teb lossis ua liaj ua teb))) THIAB (TSIS TXHOB (PUBYEAR, 2022)) THIAB (LIMIT-TO (LANGUAGE, "English")).
References
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. Tsim 3D hyperspectral cov ntaub ntawv nrog lub teeb yuag UAV snapshot koob yees duab rau kev saib xyuas zaub: los ntawm
lub koob yees duab calibration rau kev ruaj ntseg zoo. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Kev loj hlob ntawm cov qauv kev paub txog algorithm rau kev tshawb nrhiav noog tsis siv neeg los ntawm kev siv lub tsheb tsis muaj neeg taug kev.
Kev soj ntsuam. Av Qhia. Sci. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. Wireless sensor networks in Agriculture: insights from bibliometric analysis. Sustainability 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., Kev soj ntsuam ntawm ntau txoj hauv kev rau kev tshawb pom duab ntxoov ntxoo hauv cov duab kho qhov muag siab thiab kev ntsuam xyuas cov duab ntxoov ntxoo cuam tshuam rau kev suav ntawm NDVI, thiab evapotranspiration. Irrig. Sci. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. Hyperspectral imaging: a review on UAV-based sensors, data ua thiab
daim ntawv thov rau kev ua liaj ua teb thiab hav zoov. Chaw Taws Teeb 9 (11). https://doi.org/ 10.3390/rs9111110 ib.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Multi-temporal imaging using a unmanned aerial vehicle for monitoring a sunflower crop. Biosyst. Eng.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. Generation of precision elevation model los ntawm UAV tau txais qhov feem pua ntawm cov duab sib tshooj. Int.
J. Remote Sens. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Kev tshuaj xyuas cov tshuab kev kawm txog biomass thiab av noo noo retrievals los ntawm tej thaj chaw deb sensing cov ntaub ntawv. Chaw Taws Teeb 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Ntsuab internet ntawm cov khoom siv UAVs hauv B5G tes hauj lwm: Kev tshuaj xyuas cov ntawv thov
thiab cov tswv yim. Ad. Hoc. Netw. 117, 102505 https://doi.org/10.1016/j. adoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Drones for Sheep Livestock Monitoring. Hauv: 20th IEEE Mediterranean Electrotechnical Conference. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. UAV-based high throughput phenotyping in citrus utilizing multispectral imaging and artificial intelligence. Chaw Taws Teeb Pom Kev 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: Cloud-based application to process, analysis and visualize UAV-collected data for precision Agriculture applications utilizing artificial intelligence. Tshuab xam zauv. Hluav taws xob. Agric. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Cov ntaub ntawv loj thiab kev kawm tshuab nrog cov ntaub ntawv hyperspectral hauv kev ua liaj ua teb. IEEE Access 9, 36699–36718. https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Review: precision Livestock Farming technologies in pasture-based livestock systems. Tsiaj 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., Kev xav ntawm cov ntaub ntawv tshaj lij thiab kev sib txuas lus thev naus laus zis rau
Txhim kho kev tsim khoom ua liaj ua teb: kev txheeb xyuas bibliometric. Agronomy 10 (12), Tshooj 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. Tus ya gator: ntawm aerial robotics hauv occam-π. Pawg. Txheej txheem Architect. Xyoo 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. Intellectual structure of consumer complaining behavior (CCB) kev tshawb fawb: Kev tshawb fawb bibliometric. J. Business Res. 122, 60–74 : kuv.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
Kev tshawb fawb dav dav ntawm cov kev tshawb fawb tsis ntev los no nrog UAV rau kev ua liaj ua teb precision hauv thaj teb qhib thiab tsev cog khoom. Appl. Sci. 12 (3), 1047. https://doi.org/10.3390/
ua 12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). Field Phenotyping rau yav tom ntej. Hauv Kev Tshawb Fawb Txhua Xyoo hauv online (pp. 719–736). John
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Unmanned Aircraft Systems: UAVS Design, Development and Deployment. In: Unmanned Aircraft Systems: UAVS Design, Development and
Kev xa tawm. John Wiley thiab Tub. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. UAVbased remote sensing in plant stress imagine using high-resolution thermal sensor for digital Agriculture practices: a meta-review. Int. J. Environ. Sci. Tshuab. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Kev ua liaj ua teb ntse: Muaj peev xwm, kev sib tw
thiab technology enablers. 2018 IoT Vertical thiab. Topical Summit on Agriculture -Tuscany (IOT Tuscany) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. Kev kawm tob nrog cov ntaub ntawv tsis muaj kev saib xyuas rau kev tshawb nrhiav cov nroj tsuag hauv kab qoob loo hauv UAV cov duab. Chaw Taws Teeb 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Normative versus social constructivist processes in the allocation of citations: ib tug network-analytic model. Am. Sociol. Rev. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Kev soj ntsuam ntawm vineyard dej xwm txheej hloov pauv los ntawm thermal thiab multispectral
cov duab siv lub tsheb tsis muaj neeg tsav tsheb (UAV). Irrig. Sci. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., Lwm tiam yug me nyuam. Tsob Ntoo Sci. 242, 3–13 : kuv. https://doi.org/10.1016/j.
cog.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. Kev xav txog kev siv lub tshuab huab cua tsis muaj neeg saib xyuas cov nyuj. Outlook Agric. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Low-weight and UAV-based hyperspectral koob yees duab full-frame
rau kev soj ntsuam cov qoob loo: Spectral sib piv nrog portable spectroradiometer ntsuas. Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial tej thaj chaw deb sensing nyob rau hauv kev ua liaj ua teb: Ib tug tswv yim mus kom ze rau cheeb tsam kev pab them nqi
thiab txoj kev npaj rau fleets ntawm mini aerial robots. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. Kev soj ntsuam ntawm daim ntawv thov ntawm txoj kev npaj algorithms rau multi-rotor UAVs hauv precision
kev ua liaj ua teb. J. Navig. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. Lub xeev-of-the-art ntawm kev paub-intensive kev ua liaj ua teb: kev tshuaj xyuas ntawm cov txheej txheem siv qhov ntsuas thiab cov ntaub ntawv txheeb xyuas. J. Sens. 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. UAV-based imaging for multi-temporal, very resolution crop surface model to monitor crop growth variability. Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Estimating biomass of barley using crop surface model (CSMs) derived from UAVbased RGB imaging. Chaw Taws Teeb 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. Combining UAV-based plant height from crop surface qauv,
pom, thiab ze infrared zaub indices rau biomass saib xyuas hauv barley. Int. J. Appl. Earth Obs. Geoinf. 39, 79–87 : kuv. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Ferreres, E., Villalobos, F., 2009a. Daim ntawv qhia kev coj noj coj ua thiab CWSI hauv cov txiv ntseej orchards siv cov kev daws teeb meem siab
thermal tej thaj chaw deb sensing imagery. Tej thaj chaw deb Sens. Ib puag ncig. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Ferres, E., 2009b. Thermal thiab narrowband multispectral tej thaj chaw deb sensing rau cov nroj tsuag saib xyuas los ntawm ib tug unmanned aerial tsheb. IEEE Trans. Geosci. Tej thaj chaw deb Sens. 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet of Things in food safe: Literature review and a bibliometric analysis. Trends Food Sci. Tshuab. 94,54–64 : kuv. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT hauv kev ua liaj ua teb: Tsim ib tus neeg tsav dav hlau thoob teb chaws Europe. IEEE Cov. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Hla, AT, 2019. Multi-sensor UAV taug qab ntawm tus kheej cov tub ntxhais hluas thiab cov nroj tsuag hauv zej zog ntawm millimeter raug. Drones 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Kev ntsuam xyuas ntau cov duab thiab cov zaub indices rau precision ua liaj ua teb daim ntaub ntawv los ntawm UAV cov duab. Chaw Taws Teeb 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. Kev soj ntsuam cov piam thaj beet loj hlob indicators, As siv wide-dynamic-range zaub index (WDRVI) derived from UAV
cov duab multispectral. Tshuab xam zauv. Hluav taws xob. Agric. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Evolution of the intellectual structure of family business literature: a bibliometric study of FBR. Tsev Neeg Kev Lag Luam Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Dynamic monitoring of biomass of rice under
sib txawv nitrogen kev kho mob siv lub teeb yuag UAV nrog dual duab-thav duab snapshot koob yees duab. Txoj kev cog 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. Securing sustainability in Indian Agriculture through civilian UAV: lub luag hauj lwm innovation foundations. SN Appl. Sci. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Responsible governance of civilian unmanned aerial vehicle (UAV) innovations for Indian crop applications. J. Lub luag haujlwm
Tshuab. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Siv high-resolution pom-channel aerial imaging ntawm qoob loo canopy rau precision irrigation tswj. Agric. Dej
Manag. 216, 196–205 : kuv. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. Lightweight UAV with on-board photogrammetry and singlefrequency GPS positioning rau kev siv metrology. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Blockchain-based IoT platform rau autonomous drone kev tswj xyuas. Hauv: Kev Ua Haujlwm ntawm 2nd ACM
MobiCom Rhiav ntawm Drone Assisted Wireless Communications rau 5G thiab Beyond, pp. 31–36. https://doi.org/10.1145/3414045.3415939.
Hnub, RA, Gastel, B., 1998. Yuav sau thiab luam tawm ib daim ntawv tshawb fawb li cas. Cambridge University Press. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. Mapping cynodon dactylon infesting npog cov qoob loo nrog kev txiav txim siab tsis siv neeg tsob ntoo-OBIA cov txheej txheem thiab UAV cov duab rau kev txiav txim siab viticulture. Tej thaj chaw deb Sensing 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S' anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez- 'Granados, F., 2018. Tsis siv neeg random hav zoov-OBIA algorithm rau Cov nroj tsuag thaum ntxov ntawm thiab hauv cov kab qoob loo siv UAV duab. Chaw Taws Teeb Pom Kev 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. Automated Measurement of Plant Height of Nplej Genotypes Using a DSM Derived from UAV Imagery. Cov Txheej Txheem 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Lub teeb yuag semantic segmentation network rau lub sijhawm siv cov nroj tsuag tiag tiag siv lub dav hlau tsis muaj neeg tsav tsheb. Appl. Sci. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV-based multispectral remote sensing for precision Agriculture: a comparison of different cameras. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. Machine learning and remote sensing techniques use to estimate av indicators – tshuaj xyuas. Ecol. Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. High-resolution airborne UAV imagery to assessment tree crown parameters using 3D Diam duab
reconstruction: siv nyob rau hauv kev sib tw yug me nyuam. Chaw Taws Teeb 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Tshav dav hlau tswj kev muaj peev xwm: kev tshuaj xyuas thiab kev tshuaj xyuas bibliometric. J. Air Transp. Manag. 91 Ib., 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, H., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
Siv RapidEye cov duab los txheeb xyuas qhov sib txawv ntawm cov qoob loo loj hlob thiab tawm los hauv Ontario, Canada. Precision Agric. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. Kev siv cov drones ua liaj ua teb thiab iot kom nkag siab txog cov khoom noj khoom haus thaum lub sij hawm tom qab COVID-19. Hauv: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Agricultural Informatics: Automation Siv IoT thiab Machine Learning. Wiley, pp. 67–87. van Eck, N., Waltman, L., 2009. Software survey: VOSviewer, a computer program for bibliometric mapping. Scientometrics 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. Kev piav qhia ntawm Internet ntawm Yam (IoT) thiab cov ntaub ntawv txheeb xyuas hauv kev ua liaj ua teb: cov txiaj ntsig thiab cov kev sib tw.
IEEE Internet Tej Yam J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. Validation of agronomic UAV and field
kev ntsuas rau cov txiv lws suav. Tshuab xam zauv. Hluav taws xob. Agric. 158, 278–283, ib. https://doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. High resolution multispectral thiab thermal remote sensing-based water stress assessment in
subsurface irrigated grapevines. Tej thaj chaw deb Sensing 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Siv cov chaw taws teeb pom kev zoo rau cov av gradation. Tej thaj chaw deb Sensing 12 (20), 3312. ttps://doi.org/10.3390/
ib 12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. Multiscale ntsuam xyuas ntawm drone-based multispectral nto reflectance thiab zaub indices nyob rau hauv kev ua hauj lwm tej yam kev mob. Chaw Taws Teeb 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Kawm txog kev sib txuas lus wireless hauv Is Taws Nem ntawm Yam rau kev ua liaj ua teb precision. Wireless Pers. Pawg. 108 (3),
1785-1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. Cov nqi hloov pauv txoj kev xav hauv kev tshawb fawb thoob ntiaj teb kev lag luam: kev tshawb fawb bibliometric ntau dua peb xyoos lawm. Scientometrics 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. Advances in precision Agriculture in South-Eastern Australia. I. ib tug regression methodology los simulate
spatial variation nyob rau hauv cereal yields siv neeg ua liaj ua teb 'keeb kwm paddock yields thiab normalized txawv zaub index. Crop Pasture Sci. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. Science, technology thiab lub neej yav tom ntej ntawm me me autonomous drones. Xwm 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. Internet ntawm tej yam rau lub neej yav tom ntej ntawm kev ua liaj ua teb ntse: ib qho kev ntsuam xyuas dav dav ntawm cov thev naus laus zis tshiab. IEEE CAA J. Autom. Sib 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. Fig plant segmentation los ntawm cov duab saum toj saud siv lub sib sib zog nqus convolutional encoder-decoder network. Chaw Taws Teeb 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs challenge to assess water stress for
kev ua liaj ua teb sustainable. Agric. Dej Manag. 153, 9–19 : kuv. https://doi.org/10.1016/j. hnub tim.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. Thermal imaging ntawm tsob ntoo
qib los soj ntsuam cov qoob loo-dej nyob rau hauv cov ntoo almond (cv. Guara) raws li cov tswv yim tsis txaus irrigation. Agric. Dej Manag. 208, 176–186. https://doi.org/10.1016/j.
ua.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Surface reflectance and suninduced fluorescence spectroscopy measurements using a me me hyperspectral UAS. Tej thaj chaw deb Sensing 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. Ib txoj kev tsis siv neeg rau
Weed mapping in oat fields based on UAV imagery. Tshuab xam zauv. Hluav taws xob. Agric.
Gebbers, R., Adamchuk, VI, 2010. Precision Agriculture thiab Food Security. Science 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Combined spectral and spatial modeling of corn yield based on aerial dluab thiab qoob loo deg qauv tau txais nrog ib tug unmanned aircraft system. Chaw Taws Teeb 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Kev tsim kho kom ruaj khov rau cov neeg siv: kev tshuaj xyuas cov ntaub ntawv thiab kev tshuaj xyuas bibliometric. Ib puag ncig. Sci. Pollut. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. Generation of spectraltemporal response surfaces by combining multispectral satellite thiab hyperspectral
UAV imagery for precision Agriculture applications. IEEE J. Sel. Sab saum toj. Appl. Earth Obs. Tej thaj chaw deb Sens. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. IoT raws li kev ua liaj ua teb raws li huab thiab loj dataservice: pib ntawm digital India. J. Org. thiab End User Comput. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Co-citation analysis and the search for invisible universitys: a methodological evaluation. Scientometrics 57 (1), 27–57. https://doi.org/10.1023/
a: 1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Digital counts of maize plants by Unmanned Aerial Vehicles (UAVs). Chaw Taws Teeb 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. Ib tug Rotary-wing unmanned air vehicle rau dej hiav txwv soj ntsuam thiab
kev tswj hwm. J. Intell. Robotic Syst.: Theor. Appl. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. Kev ntsuam xyuas qhov tseeb ntawm mosaics los ntawm unmanned aerial tsheb (UAV) imagery rau precision ua liaj ua teb hom phiaj nyob rau hauv hom qoob mog. Precis. Agric. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´on,´ D., Virlet, N., Labb'e, S., Jolivot, A., Regnard, J.-L., 2016. Field phenotyping of water stress at tree scale by UAV-sensed imagery : tshiab insights for
thermal tau thiab calibration. Precis. Agric. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Ferreres, E., 2014. Kev siv tau thiab cov kev txwv ntawm kev siv cov qoob loo kev ntxhov siab rau cov qoob loo raws li qhov taw qhia ntawm cov dej tsis txaus hauv cov citrus orchards. Agric. Rau. Meteorol. 198–199, 94–104, ib. https://doi.org/10.1016/j. ua.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Ferreres, E., 2013. Use high resolution UAV thermal imagery to
ntsuam xyuas qhov sib txawv ntawm cov dej ntawm tsib hom txiv hmab txiv ntoo nyob rau hauv ib lub vaj txiv hmab ua lag luam. Precis. Agric. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. Kev paub txog nyiaj txiag: Kev tshuaj xyuas cov txheej txheem thiab kev tshuaj xyuas bibliometric. Int. J. Consumer Studies 45 (1), 80–105. https://doi.org/10.1111/
ib., 12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. The photogrammetric potential of lowcost uavs in forestry and Agriculture. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences – ISPRS Archives 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. Kev ntsuas kev sib raug zoo ntawm kev daws teeb meem siab
NDVI nrog rau qib kev siv chiv thiab cov qoob loo ntawm cov nplej thiab nplej qoob loo siv me me UAVs. Chaw Taws Teeb 11 (2), 112.
Gundolf, K., Filser, M., 2013. Kev tswj xyuas kev tshawb fawb thiab kev ntseeg: kev txheeb xyuas cov ntaub ntawv. J. Bus. Ethics 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD simulation thiab kuaj xyuas qhov chaw thiab kev faib tawm ntawm lub sijhawm
lub downwash airflow ntawm quad-rotor ua liaj ua teb UAV nyob rau hauv hover. Tshuab xam zauv. Hluav taws xob. Agric. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz'alez P'erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , Poland, J., 2016.
Daim ntawv thov ntawm unmanned aerial systems rau siab throughput phenotyping ntawm loj hom qoob mog yug me nyuam. Cog Txoj Kev 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. Spectral imaging from UAVs under varying illumination conditions . Hauv GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Issue 1W2, pp. 189–194). International Society for Photogrammetry thiab Remote Sensing. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. Kev ntsuam xyuas cov tswv yim rau kev kos duab cov nroj tsuag los ntawm lub dav hlau tsis muaj neeg siv
tsheb (UAV) images: Pixel classification, visual interpretation and machine learning approaches. Int. J. Appl. Earth Obs. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Kev ua liaj ua teb ntse los ntawm kev ua thawj coj hauv bangladesh: possibilities, cib fim, thiab tshaj.
Sustainability 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Me-scale remotely piloted vehicles in environmental research. Geography Compass 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381 XNUMXx.
Hardin, PJ, Jensen, RR, 2011. Me me-scale unmanned aerial tsheb nyob rau hauv ib puag ncig tej thaj chaw deb sensing: kev cov nyom thiab lub cib fim. GISci. Tej thaj chaw deb Sens. 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Agricultural Internet of Things: technologies and applications, (1st ed. 2021 edition). Springer.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, Xyoo 2004.
Kev yees duab los ntawm lub tsheb tsis muaj neeg tsav dav hlau: kev soj ntsuam ua liaj ua teb thiab kev txiav txim siab txhawb nqa. Tshuab xam zauv. Hluav taws xob. Agric. 44 (1), 49–61. https://doi.org/10.1016/j.
sib.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, High throughput field phenotyping of wheat plant height and growth rate in field trials using UAV based remote sensing. Chaw Taws Teeb 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. Processing and assessment ntawm spectrometric, stereoscopic imagery sau siv lub teeb yuag UAV spectral koob yees duab rau precision ua liaj ua teb. Chaw Taws Teeb Pom Kev 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Low-altitude unmanned aerial vehiclesbased internet of things services: comprehensive survey and future perspectives. IEEE Internet Tej Yam J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. Combined optic-flow and stereo-based navigation of urban canyons for a UAV. Xyoo: 2005 IEEE/RSJ
International Conference on Intelligent Robots and Systems, pp. 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. A Creative IoT Agriculture platform for cloud cloud computing. Txhawb nqa. Tshuab xam zauv. Inf. Syst. 28 Ib., 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. A tag nrho convolutional network rau cov nroj tsuag mapping ntawm unmanned aerial tsheb ( UAV) imagery. PLoS IB 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Deep learning versus Object-based Image Analysis (OBIA) in weed mapping of UAV imagery. Int. J.
Tej thaj chaw deb Sens. 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. Sib sib zog nqus xim calibration rau UAV imagery hauv kev saib xyuas qoob loo
siv semantic style hloov nrog lub zos mus rau lub ntiaj teb no mloog. Int. J. Appl. Earth Obs. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. Kev loj hlob thiab kev cia siab ntawm unmanned aerial tsheb technologies rau kev ua liaj ua teb ntau lawm
kev tswj hwm. Int. J. Agric. Biol. Eng. 6 (3), 1–10. https://doi.org/10.3965/j. ib.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Kev tsim kho cov tshuaj tsuag rau lub tsheb tsis muaj neeg tsav tsheb. Appl. Eng. Agric. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. Tau txais NIR-ntsuab-xiav cov duab digital los ntawm
unmanned aircraft rau kev saib xyuas qoob loo. Chaw Taws Teeb 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Satellite- and drone-based remote sensing of crops and soils for smart farming–kev tshuaj xyuas. Av Sci. Cog Nutr. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. Kev tshuaj xyuas cov ntawv thov thiab kev sib txuas lus thev naus laus zis rau Internet ntawm Yam (IoT) thiab
Unmanned Aerial Vehicle (UAV) based sustainable smart farming. Sustainability 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Kev ntsuam xyuas qhov tseeb ntawm cov kev daws teeb meem siab digital nto qauv suav los ntawm
PhotoScan® thiab MicMac® nyob rau hauv cov kev soj ntsuam zoo tshaj plaws. Chaw Taws Teeb Pom Kev 8 (6), https://doi.org/10.3390/rs8060465.
Jim'enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S' anchez, J., Serrano, N., Pena, ˜ JM, 2017. Quantifying pruning impacts on olive tree architecture thiab txhua xyoo canopy kev loj hlob los ntawm kev siv UAV-based 3D qauv. Cog Txoj Kev 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl'e, M., Comar, A., 2017. Kev kwv yees ntawm cov nroj tsuag ntom ntom ntawm cov qoob loo ntawm cov qoob loo thaum tshwm sim los ntawm qhov siab qis heev UAV imagery. Tej thaj chaw deb Sens.
Ib puag ncig. 198, 105–114, ib. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Kev saib xyuas cov khoom ua liaj ua teb txhawb nqa los ntawm huab xam. Cluster Comput. 22 (4), 8929–8938.
Ju, C., & Son, HI 2018a. Kev ntsuas kev ua tau zoo ntawm ntau lub UAV rau cov chaw taws teeb pom kev hauv kev ua liaj ua teb. Kev Ua Haujlwm ntawm Rhiav ntawm Robotic Vision thiab Action in Agriculture ntawm IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26.
Ju, C., Son, HI, 2018b. Ntau lub UAV rau kev siv ua liaj ua teb: kev tswj, kev siv, thiab kev ntsuas. Electronics 7 (9), 162. https://doi.org/10.3390/
electronics 7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. Lub peev xwm ntawm kev paub txog tej thaj chaw deb thiab kev txawj ntse li cov cuab yeej los txhim kho lub
resilience ntawm kev ua liaj ua teb ntau lawm systems. Curr. Opin. Biotechnol. 70, 15–22 : kuv. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. Ib qho kev txhim kho qoob loo scouting cov txheej txheem suav nrog lub tsheb tsis muaj neeg tsav dav hlau-pab ntau cov duab thaij duab rau hauv cov qauv kev tshawb nrhiav rau cov kab mob gummy qia blight hauv cov txiv tsawb. cog Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. Kev nce qib hauv kev tshawb fawb txog kev sib raug zoo: yav dhau los, tam sim no thiab yav tom ntej. Qhia. Syst. Pem hauv ntej. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: vine kab mob nrhiav pom network raws li cov duab ntau yam thiab daim ntawv qhia tob. Chaw Taws Teeb 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. Kev sib piv ntawm satellite thiab UAV-based multispectral imagery rau vineyard
kev ntsuam xyuas txawv. Chaw Taws Teeb 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain enabled optimized provenance system rau zaub mov kev lag luam 4.0 siv kev kawm tob tob. Sensors 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. Image-based detection of plant disease: from classical machine learning to deep learning journey. Wireless Commun. Txawb Computer. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. A novel semi-supervised framework for UAV based crop/weed classification. PLoS ONE 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Ib qho kev piav qhia ntawm tam sim no thiab muaj peev xwm siv ntawm thermal tej thaj chaw deb sensing nyob rau hauv precision ua liaj ua teb. Tshuab xam zauv. Hluav taws xob.
Agric. 139, 22–32 : kuv. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolution of Internet of Things (IoT) thiab nws qhov cuam tshuam tseem ceeb hauv kev ua liaj ua teb Precision. Tshuab xam zauv. Hluav taws xob. Agric. 157, 218–231 : kuv.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. Kev koom tes ntawm cov neeg ua haujlwm rau cov koom haum muaj kev vam meej: lo lus tseem ceeb siv kev txheeb xyuas kev sib tham thiab tawg
nrhiav kom tau. Sustainability 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Kev sib koom ua ke ntawm terrestrial thiab drone-borne
hyperspectral thiab photogrammetric sensing txoj kev rau kev tshawb nrhiav daim ntawv qhia thiab kev saib xyuas mining. Tej thaj chaw deb Sensing 10 (9), 1366. https://doi.org/10.3390/
ib 10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Kev suav cog pob kws siv kev kawm tob thiab UAV cov duab. IEEE Geosci. Chaw Taws Teeb Sens. Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Automated machine learning for highthroughput image-based plant phenotyping. Chaw Taws Teeb 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. Niaj hnub nimno technologies trends nyob rau hauv txoj kev loj hlob ntawm ecosystem ntawm cargo UAVs. J. Phys. Conf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM rau cov tsiaj txhu sab hauv tsev thiab ua liaj ua teb siv lub drone me me nrog lub koob yees duab monocular: kev kawm ua tau.
Drones 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie'c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Kev soj ntsuam ntawm drones rau kev ua liaj ua teb automation los ntawm cog rau
sau qoob. Hauv: INES 2018 - IEEE 22nd International Conference on Intelligent Engineering Systems, pp. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT framework views and challenges: to protecting drones as “Things”. Sensors 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte.
thaj chaw. GISci. Cov Thawj Coj Hauv Cheeb Tsam. 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. Unmanned aerial tsheb rau rangeland mapping thiab saib xyuas: kev sib piv ntawm ob lub tshuab. ASPRS Kev Sib Tham Txhua Xyoo Ua Haujlwm.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. Ib qho qhib qhov chaw ua hauj lwm rau cov nroj tsuag hauv cov nyom ib txwm muaj
siv lub tsheb tsis muaj neeg tsav dav hlau: Siv Rumex obtusifolius ua qhov kev tshawb fawb. Eur. J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. Adoption, profitability, and make better use of precision farming data.
Daim ntawv ua haujlwm. Purdue University. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger. Sensors 2008 (8), 5–3557. https://doi.org/3585/s10.3390.
Li, C., Niu, B., 2020. Tsim kev ua liaj ua teb ntse raws li cov ntaub ntawv loj thiab Internet ntawm yam. Int. J. Distrib. Sens. Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu. tus nqi qis unmanned aerial tsheb system. Ecol. Ib., 2016, 67–637. https://doi.org/648/j.ecolind.10.1016.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Kev kawm tshuab hauv kev ua liaj ua teb: kev tshuaj xyuas. Sensors 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Tej thaj chaw deb, huab cua phenotyping ntawm pob kws zoo nrog ib tug mobile multi-sensor mus kom ze. Txoj kev cog 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Sorghum panicle detection and counting using unmanned aerial system images and deep learning. Pem hauv ntej. Tsob Ntoo Sci. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Internet of Things monitoring system of modern eco-agriculture based on cloud computing. IEEE Access 7, 37050–37058.
Lopez-Granados, ´ F., 2011. Weed detection for site-specific weed management: mapping and real-time approaches. Weed Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. Object-raws li kev saib xyuas thaum ntxov ntawm cov nroj tsuag nyom hauv cov nyom nyom siv kev daws teeb meem siab UAV duab. Agro. Txhawb nqa. Dev. 36 (4), 1–12
Lopez-Granados, 'F., Torres-S' anchez, J., Serrano-P'erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. Lub caij nplooj ntoo hlav thaum ntxov hauv paj paj siv thev naus laus zis UAV: kev hloov pauv ntawm cov tshuaj tua kab mob tshuaj tiv thaiv cov kab pib. Precis. Agric. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – imaging spectroscopy from a multirotor unmanned aircraft system. J. Field Rob. 31 (4),
571–590 : kuv. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Klemola, J., 2008. Terrestrial laser scanning of qoob loo ua liaj ua teb. Hauv JJ
Chen J. Maas H–G. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 37, pp. 563–566).
International Society for Photogrammetry thiab Remote Sensing. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574 ib
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. A review of supervised objectbased land-cover image classification. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 130,
277–293 : kuv. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. Kev pom rau tej thaj chaw deb sensing nrog unmanned aerial tsheb nyob rau hauv precision ua liaj ua teb. Trends Plant Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Unmanned aerial system (UAS)-based phenotyping of soybean using multi-sensor data fusion and extreme learning machine. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
Kev saib xyuas qoob loo siv satellite / UAV data fusion thiab machine learning. Tej thaj chaw deb Sensing 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P'erez, G., Su, Z., Vico, G., Toth , B., 2018. Ntawm kev siv cov tshuab tsis muaj neeg tsav dav hlau rau
kev saib xyuas ib puag ncig. Chaw Taws Teeb Pom Kev 10 (4), 641.
Marinko, RA, 1998. Citations to women's studies journals in dissertations, 1989 and The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Resource Management in UAV-assisted wireless networks: an optimization perspective. Ad Hoc Netw. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Cov kev siv ntawm cov multisensor UAV platform raws li multispectral, thermal thiab RGB siab daws teeb meem dluab nyob rau hauv precision
viticulture. Kev ua liaj ua teb 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Tshaj li qhov kev ntsuas NDVI ib txwm muaj raws li qhov tseem ceeb ntawm kev siv UAV hauv kev ua yeeb yam zoo. Sci. Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 Intercomparison of UAV, aircraft
thiab satellite tej thaj chaw deb sensing platforms rau precision viticulture. Chaw Taws Teeb 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV and machine learning based refinement of a satellite-driven zaub index for precision
kev ua liaj ua teb. Sensors 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. Daim ntawv qhia cov kws sau ntawv hauv qhov chaw txawj ntse: kev saib xyuas. J. Am. Soc. Cov ntaub ntawv. Sci. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. Agricultural erosion modelling: ntsuam xyuas USLE thiab WEPP field-scale erosion kwv yees siv UAV time-series data. Ib puag ncig. Qauv. Software 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Classification of lowland native grassland community using hyperspectral Unmanned Aircraft System (UAS) Imagery in the
Tasmanian midlands. Drones 3 (1), 5.
Messina, G., Modica, G., 2020. Applications of UAV thermal imagery in precision Agriculture: state of the art and future research outlook. Chaw Taws Teeb Pom Kev 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. Ib phau ntawv kawm txog cov ntaub ntawv loj: cov ntsiab lus, tiam sis thiab cov teeb meem. Kev Tswj Lag Luam. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Kev txhim kho qoob loo siv cov ntaub ntawv ntawm lub neej nyob rau hauv cov xwm txheej hauv cheeb tsam. Pem hauv ntej. Tsob Ntoo Sci. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. Kev tshuaj xyuas ntawm kev siv cov tshuab drone hauv kev ua liaj ua teb precision. Procedia Comput. Sci. 133, 502–509, ib.
Moharana, S., Dutta, S., 2016. Spatial variability of chlorophyll and nitrogen content of rice from hyperspectral imagery. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. IoT thiab kev ua liaj ua teb cov ntaub ntawv tsom xam rau kev ua liaj ua teb ntse. Tshuab xam zauv. Hluav taws xob. Agric. 156, 467–474, ib.
Nansen, C., Elliott, N., 2016. Remote sensing and reflectance profiling in entomology. Annu. Rev. Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Multispectral mapping in Agriculture: terrain mosaic using an autonomous quadcopter UAV. Int. Conf.
Unmanned Aircraft Syst. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Internet ntawm drone yam (Iodt): yav tom ntej kev xav ntawm ntse drones. Adv. Intell. Syst. Tshuab xam zauv. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. A light-weight multispectral sensor for micro UAV—kev muaj lub cib fim rau kev daws teeb meem siab heev hauv huab cua hauv tej thaj chaw deb sensing. Int. Arch. Photogramm. Tej thaj chaw deb Sens. Spat. Inf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.Y., Choi, H.L., 2019. Emerging UAV applications in Agriculture. Hauv: 2019 7th International Conference on Robot Intelligence Technology thiab
Cov ntawv thov (RiTA), p. 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. Cov qauv kev txawj ntse ntawm txoj kev tswj hwm kev lag luam: tus sau phau ntawv co-citation tsom xam. Tswv yim. Manag. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Tsis siv neeg txheeb xyuas thiab saib xyuas cov kab mob nroj tsuag siv cov tsheb tsis muaj neeg tsav dav hlau: kev tshuaj xyuas. Chaw Taws Teeb 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV for 3D mapping applications: a review. Appl. Geomatics 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Evapotranspiration estimation with me UAVs in precision Agriculture. Sensors 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrics, Citation Analysis thiab Co-Citation Analysis. Kev Ntsuam Xyuas Phau Ntawv I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, sensors, and data processing in agroforestry: kev tshuaj xyuas rau kev siv tau. Int. J. Remote Sens. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, US, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. Kev tshuaj xyuas ntawm drone-based data solutions for cereal crops. Drones 4 (3), 1–29. https://doi.org/10.3390/
drones4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Kev kwv yees roj thiab cov ntsiab lus protein ntawm cov noob hnav siv cov duab ua thiab cov khoom siv neural network. J. Am. Roj
Chemists 'Soc. 97 (7), 691–702.
Pena, ˜ JM, Torres-Sanchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., Weed mapping in the early-season maize fields using object-based analysis ntawm
Unmanned aerial vehicle (UAV) Images. PLoS IB 8 (10), e77151.
P'erez-Ortiz, M., Pena, ˜ JM, Guti'errez, PA, Torres-S' anchez, J., Herv' as-Martínez, C.,
Lopez-Granados, ´ F., 2015. Ib qho kev saib xyuas ib nrab rau cov nroj tsuag hauv cov qoob loo paj noob hlis uas siv cov tsheb tsis muaj neeg tsav dav hlau thiab txoj kev tshawb nrhiav qoob loo. Appl. Soft Computer. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. Tus nqi siv nyiaj IoT zoo li cov ntaub ntawv ntseeg siab rau lub blockchain-raws li kev tswj dej hauv kev ua liaj ua teb. Tshuab xam zauv. Hluav taws xob. Agric. 180, 105889 ib.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Advanced UAV-WSN system for intelligent monitoring in precision Agriculture. Sensors 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. Blockchain applications in supply chains, transport and logistics: a systematic review of the literature. Int. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. Ib lub tsheb tsis muaj neeg tsav dav hlau rau kev ua liaj ua teb.
Precis. Agric. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. Statistical bibliography lossis bibliometrics. J. Cov ntaub ntawv. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. Qhov tsim nyog ntawm lub tsheb tsis muaj neeg tsav dav hlau (UAV) rau kev soj ntsuam ntawm kev sim teb thiab cov qoob loo. Ua liaj ua teb 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Kev ua liaj ua teb drones: ib tug niaj hnub breakthrough nyob rau hauv precision ua liaj ua teb. J. Statis. Manag. Syst. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. A compilation of UAV applications for precision Agriculture. Tshuab xam zauv. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Kev siv cov ntaub ntawv loj analytics thiab kev txawj ntse txawj ntse hauv kev tshawb fawb agronomic. Indian J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. Kev soj ntsuam bibliometric ntawm kev siv lub dav hlau tsis muaj neeg siv hauv kev tshawb fawb txog kev ua liaj ua teb thiab hav zoov. Int. J. Tej thaj chaw deb Sens. 40 (24),
9070-9083 : kuv. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
Muaj peev xwm siv cov tshuab me me tsis muaj neeg tsav dav hlau (UAS) hauv kev tshawb nrhiav nroj tsuag. Weed Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S.
UAVs txaus ntseeg tau rau kev soj ntsuam cov phiaj xwm kev sim? Eur. J. Agron. 74, 75–92 : kuv. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Digitalization in food supply chains: a bibliometric review and key-route main path
tsom xam. Sustainability 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Drones rau kev tswj cov saw hlau thiab logistics: kev tshuaj xyuas thiab kev tshawb fawb cov txheej txheem. Int. J. Logist. Res. Appl.
1-24 : kuv. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. Blockchain technologies hauv logistics thiab kev tswj cov saw hlau: kev tshuaj xyuas bibliometric. Logistics 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Humanitarian drones: kev tshuaj xyuas thiab tshawb fawb txheej txheem. Internet of Things 16, 100434. https://doi.org/10.1016/j.
ib. 2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Kev tshawb fawb Blockchain hauv kev kho mob: kev tshuaj xyuas bibliometric thiab cov kev tshawb fawb tam sim no. J. ntawm Data, Inf. thiab
Manag. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Internet of Things research in supply chain management and logistics: a bibliometric analysis. Internet
Ntawm Yam 12, 100318.
ReportLinker, 2021. Ntiaj teb no Kev Ua Liaj Ua Teb Drones Kev Lag Luam kom ncav cuag US $ 15.2 billion los ntawm YearGlobeNewswire Xov Xwm Chav. Tau qhov twg los: https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Xyoo 2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. Uncooled thermal lub koob yees duab calibration thiab optimization ntawm lub
photogrammetry process for UAV applications in Agriculture. Sensors (Switzerland) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. Kev tshawb fawb txog kev tos txais qhua: "Los ntawm Rodney Dangerfield mus rau Aretha Franklin". Int. J. Contempor. Tsev kho mob. Manag. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Mini-UAV based sensory system for Measuring environmental variables in greenhouses. Sensors 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. Consumer-grade UAV use for detecting and analyzing late-season weed spatial distribution patterns in commercial dos fields. Precis. Agric. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Unmanned aerial tsheb (UAV) ua haujlwm spectral koob yees duab system rau kev siv hav zoov thiab kev ua liaj ua teb. Ua mus. SPIE – Int. Soc. Xaiv. Eng. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Kev tshuaj xyuas ntawm cov teeb meem los siv drone logistics. Int. J. Logist. Res. Appl. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, IOT-based drone rau kev txhim kho qoob loo zoo hauv kev ua liaj ua teb. Hauv SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-January, pp. 612–615). Lub koom haum
ntawm Hluav taws xob thiab Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: ib qho tshiab thiab muaj txiaj ntsig LED raws kev sib txuas lus rau kev ua liaj ua teb precision. IEEE Conf. Cov ntaub ntawv. Pawg. Tshuab. Xyoo 2019, 1-5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. UAV flight trials apply to the remote sensing of vegetated areas. Chaw Taws Teeb 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
Low-altitude, high-resolution aerial imaging systems rau kab thiab teb qoob loo phenotyping: kev tshuaj xyuas. Eur. J. Agron. 70, 112–123 : kuv. https://doi.org/10.1016/j.
ib. 2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. High-resolution UAV-raws li thermal imaging los kwv yees lub
instantaneous thiab hloov raws caij nyoog ntawm cov nroj tsuag dej raws li txoj cai nyob rau hauv ib tug vineyard. Agric. Dej Manag. 183, 49–59 : kuv. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Beyond citation analysis: Ib qho qauv rau kev soj ntsuam ntawm kev tshawb fawb cuam tshuam. J. Med. Library Assoc. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Earth system science related spectroscopy—an assessment. Tej thaj chaw deb Sens. Ib puag ncig. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Saib xyuas agronomic parameters of winter wheat crops with low-cost UAV
duab. Chaw Taws Teeb 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III.
ua liaj teb. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
Enabling precision ua liaj ua teb los ntawm embedded sensing nrog artificial txawj ntse. IEEE Trans. Instrum. Meas. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Unmanned Aerial Vehicles (UAVs): kev soj ntsuam ntawm pej xeem cov ntawv thov thiab cov kev sib tw tseem ceeb ntawm kev tshawb fawb. IEEE Access 7,
48572-48634 Ib. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. Cov ntaub ntawv loj uas tau tsav kev ua liaj ua teb: cov ntaub ntawv loj hauv kev cog qoob loo, genomics, thiab kev siv cov chaw taws teeb sensing
technologies los mus nce qoob loo productivity. Plant Phenome J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. Comparitive Analysis and Implication of UAV and AI in Forensic Investigations. Hauv: Kev Ua Haujlwm - 2019 Amity International
Lub Rooj Sab Laj ntawm Artificial Intelligence. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. Lub luag hauj lwm ntawm kev txawj ntse txawj ntse nyob rau hauv kev tswj cov saw saw: daim ntawv qhia thaj chaw. Int. J.
Prod. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan ,MV,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Npis Sov, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. Unmanned aerial tsheb rau high-throughput phenotyping thiab agronomic tshawb fawb. PLOS IB
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Nqe, R., Basso, B., 2019. Capturing maize stand heterogeneity thoob plaws yield-stability zones siv Unmanned Aerial
Vehicles (UAV). Sensors 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Co-citation nyob rau hauv cov ntaub ntawv scientific: ib qho kev ntsuas tshiab ntawm kev sib raug zoo ntawm ob cov ntaub ntawv. J. Am. Soc. Cov ntaub ntawv. Sci. 24 (4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. Visualizing science by citation mapping. J. Am. Soc. Cov ntaub ntawv. Sci. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. Nyuj suav nyob rau hauv cov qus nrog geolocated aerial dluab nyob rau hauv loj pasture cheeb tsam. Tshuab xam zauv. Hluav taws xob. Agric. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. Ib txoj hauv kev rau kev txhim kho txoj hauv kev hauv kev siv cov kev ua liaj ua teb precision siv UAVs Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. Ua kom tiav kev ua liaj ua teb hauv lub xyoo pua 21st. J. Agric. Eng. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Kev ntsuam xyuas qoob loo drought los ntawm tej thaj chaw deb sensing imagery siv unmanned aerial tsheb. Hauv 2018 37th Suav Tswj Kev Sib Tham (CCC).
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. Nplej daj xeb xyuas los ntawm kev kawm los ntawm multispectral UAV aerial imagery.
Tshuab xam zauv. Hluav taws xob. Agric. 155, 157–166. https://doi.org/10.1016/j. hmoob.2018.10.017.
Su, Y., Wang, X., 2021. Innovation ntawm kev ua liaj ua teb kev tswj hwm kev lag luam hauv cov txheej txheem ntawm kev tsim ua liaj ua teb ntse los ntawm cov ntaub ntawv loj. Sustainable Comput. Inf. Syst. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. Kev ntsuam xyuas qhov rhiab heev ntawm lub unmanned thermal infrared aerial system kom ntes dej kev ntxhov siab hauv cov paj rwb. Trans. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. Kev sib koom ua ke ntawm RGB-raws li cov nroj tsuag index, qoob loo ntawm cov qauv thiab cov duab-raws li cov duab tsom mus rau kev kwv yees cov qoob loo uas siv cov tsheb tsis muaj neeg tsav tsheb. Tshuab xam zauv. Hluav taws xob. Agric. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. A light-weight hyperspectral mapping system for
unmanned aerial tsheb - thawj qhov tshwm sim. Nyob rau hauv: 2013 5th Rhiav ntawm Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), pp. 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. Ib lub teeb yuag hyperspectral
daim ntawv qhia qhov system thiab photogrammetric ua cov saw rau unmanned aerial tsheb. Chaw Taws Teeb 6 (11), 11013–11030. https://doi.org/10.3390/
ib 61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. Advance control strategies using image processing, UAV and AI in Agriculture: A review. World J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Cov ntaub ntawv ua haujlwm siv cov ntawv pov thawj los tshawb xyuas phau ntawv xov xwm cuam tshuam hauv kev suav nyiaj. Inf. Txheej txheem. Tswj. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Kev soj ntsuam ntawm 5G network thiab nws qhov cuam tshuam rau kev ua liaj ua teb: cov kev cov nyom thiab cov hauv kev. Tshuab xam zauv.
Hluav taws xob. Agric. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. Cov ntaub ntawv-tsav kev txiav txim siab hauv kev ua liaj ua teb precision: qhov nce ntawm cov ntaub ntawv loj hauv kev ua liaj ua teb. J. Agric. Cov Ntaub Ntawv Khoom Noj.
20 (4), 344–380: kuv.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Ntxuam, L., 2020. Estimation of the yield and plant height of winter wheat using UAV- raws li cov duab hyperspectral.
Sensors 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. Coordinated aerobiological sampling of a plant pathogen in the low space using two autonomous unmanned aerial vehicles. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. Kev txheeb xyuas thiab kev faib cov kab tsuag taum mog siv kev kawm tob
with UAV images. Tshuab xam zauv. Hluav taws xob. Agric. 179, 105836 ib.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. Kev Siv Uas rau Kev Ntsuas Kev Ua Liaj Ua Teb hauv AN Wetland hauv Tanzania hauv— Thiab WetSeason rau Sustainable Agriculture thiab muab qhov tseeb hauv av rau Terra-Sar X cov ntaub ntawv. Hauv: ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, pp. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Bibliometrics to webometrics. J. Cov ntaub ntawv. Sci. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. Ib qho khoom siv tsis siv neeg raws li txoj hauv kev rau kev pom zoo nyob rau hauv UAV cov duab: daim ntawv thov rau kev tshawb nrhiav zaub hauv cov qoob loo herbaceous. Tshuab xam zauv. Hluav taws xob. Agric. 114, 43–52 : kuv. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. High-throughput 3-D saib xyuas kev ua liaj ua teb-tsob ntoo cog nrog Unmanned Aerial Vehicle (UAV) technology. PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. Multi-temporal mapping of the vegetation fraction in early-season wheat fields using images from UAV. Tshuab xam zauv. Hluav taws xob. Agric. 103, 104–113 : kuv. https://doi.org/10.1016/j. sib.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. A review on UAV-based applications for precision Agriculture. Cov ntaub ntawv (Switzerland) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Optimizing drone flight plan for Measuring horticultural tree crop structure. ISPRS J. Photogramm.
Tej thaj chaw deb Sens. 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Internet of Things hauv kev ua liaj ua teb, kev nce qib tsis ntev los no thiab cov kev cov nyom yav tom ntej. Biosyst. Eng. 164, 31–48 : kuv.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Scientometric mapping of computer science research in Mexico. Scientometrics 105 (1), 97–114.
UN., 2019. World population prospects 2019. https://population.un.org/wpp/ (Accessed on 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Characterization of rice paddies by a UAVmounted miniature hyperspectral sensor system. IEEE J. Sel. Sab saum toj. Appl. Earth Obs.
Tej thaj chaw deb Sens. 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Nqe, KP, Sharda, A., 2020. Drones hauv
kev ua liaj ua teb. Adv. Agro. 162, 1–30 : kuv.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
Unmanned Aerial Vehicles (UAV) hauv kev ua liaj ua teb precision: daim ntawv thov thiab kev sib tw. Zog 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. Daim ntawv qhia thiab kev faib tawm ntawm ecologically rhiab marine chaw nyob siv Unmanned Aerial
Vehicle (UAV) imagery and Object-Based Image Analysis (OBIA). Tej thaj chaw deb Sensing 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Green area Performance index los ntawm unmanned aerial system over nplej thiab rapeseed qoob loo . Tej thaj chaw deb Sens. Ib puag ncig. 152, 654–664, ib. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. Deploying four optical UAV-based sensors over grassland: challenges and
txwv. Biogeosciences 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Internet ntawm cov khoom hauv av hauv kev ua liaj ua teb precision: architecture thiab technology. Ad Hoc Netw. 81,
160–173 : kuv. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. Lub luag haujlwm tsim kev txawj ntse ua ib qho khoom zais zais rau kev noj qab haus huv digital: kev tshuaj xyuas bibliometric, kev nkag siab, thiab cov lus qhia tshawb fawb.
Cov ntaub ntawv. Syst. Pem hauv ntej. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Bibliometric tsom xam ntawm tej thaj chaw deb sensing kev tshawb fawb qauv nyob rau hauv kev saib xyuas kev loj hlob qoob loo: Cov ntaub ntawv kawm nyob rau hauv Suav teb. Chaw Taws Teeb 11 (7). https://doi.org/10.3390/rs11070809.
Dawb, HD, Griffith, BC, 1981. Sau cocitation: Cov ntaub ntawv ntsuas ntawm kev txawj ntse qauv. J. Am. Soc. Cov ntaub ntawv. Sci. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Kev loj hlob ntawm tus nqi qis ua liaj ua teb tej thaj chaw deb sensing system raws li ib tug autonomous unmanned aerial tsheb (UAV). Biosyst. Eng. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. Kev tshuaj xyuas ntawm tsob ntoo siab-throughput phenotyping zoo siv UAVbased sensors. Tshuab xam zauv. Hluav taws xob. Agric. 178, 105731 https://doi.org/10.1016/j.
sib.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Unmanned aerial vehicle for remote sensing applications—kev tshuaj xyuas. Chaw Taws Teeb 11 (12). https://doi.org/10.3390/
ib 11121443.
Yeom, S., 2021. Tsiv tib neeg taug qab thiab tsis raug tshem tawm nrog infrared thermal imaging los ntawm multirotor. Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. Kev sib piv ntawm cov qoob loo kwv yees siv cov duab los ntawm UAV-mounted
snapshot hyperspectral sensor thiab high-txhais lub koob yees duab digital. Tej thaj chaw deb Sensing 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Kev kwv yees lub caij ntuj no hom qoob mog saum av biomass siv unmanned aerial tsheb- raws snapshot
hyperspectral sensor thiab qoob loo qhov siab txhim kho qauv. Chaw Taws Teeb 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. Siv lub teeb yuag unmanned aerial tsheb los saib xyuas hav zoov hav zoov rov qab. Biol.
Txuag. 186, 287–295 : kuv. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
Ntse ua liaj ua teb IoT platform raws ntug thiab huab xam. Biosyst. Eng. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. Tsob ntoo qhov siab kom muaj nuj nqis siv cov duab siab heev uas tau txais los ntawm lub dav hlau tsis muaj neeg siv
Vehicle (UAV) and automatic 3D photo-reconstruction method. Eur. J. Agron. 55, 89–99 : kuv. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. Image-based phenotyping of flowering intensity in coolseason crops. Sensors 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. Daim ntawv thov ntawm me me unmanned aerial systems rau precision ua liaj ua teb: kev tshuaj xyuas. Precis. Agric. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. Mapping maize water stress based on UAV multispectral remote sensing. Chaw Taws Teeb Pom Kev 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. Ib qho kev kawm sib sib zog nqus-raws li txoj hauv kev rau automated daj xeb
Kev kuaj pom kab mob los ntawm kev daws teeb meem siab hyperspectral UAV cov duab. Chaw Taws Teeb 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Kev txheeb xyuas thiab kev ntxub ntxaug kab mob thiab kab kev ntxhov siab ntawm cov tshuaj yej tsob nroj siv cov duab hyperspectral ua ke nrog kev tsom xam wavelet. Tshuab xam zauv. Hluav taws xob. Agric. 193, 106717 https://doi.org/10.1016/j. sib.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropy coj adversarial domain adaptation rau aerial duab semantic segmentation. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Kev txheeb xyuas cov nplej phenology los ntawm lub sij hawm series tsom xam ntawm av-raws li spectral cov ntaub ntawv index. Field Crops Res. 198, 131–139, ib. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Tsim ib tug precision ua liaj ua teb to seeding system raws li wireless sensors. Int. J. Online Eng. 14 (05), 184 (ib.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. Analysis of plant height change of lodged maize using UAV-LiDAR data. Ua liaj ua teb 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: A pob kws duab tsom xam software siv kev kawm tob rau cov nroj tsuag phenotyping high-throughput . Txoj kev cog 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Predicting grain yield in mov uas siv ntau lub sijhawm zaub
Indices los ntawm UAV-based multispectral thiab digital imagery. ISPRS J. Photogramm. Tej thaj chaw deb Sens. 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. Simulation ntawm cov thev naus laus zis tseem ceeb ntawm lub tsev cog khoom raws li lub wireless sensor network. Int. J. Online Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. Kev ntsuam xyuas rau cov qoob loo kev ntxhov siab nrog infrared thermal imagery hauv kev ua liaj ua teb precision: kev tshuaj xyuas
thiab kev cia siab yav tom ntej rau kev kawm tob. Tshuab xam zauv. Hluav taws xob. Agric. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}